





















7
“Actuator Setup” submenu displays all stander actuator settings
for proper position angles to allow a
“comfortable” operation i.e. Soft
start/stop.
To adjust the stander actuator for a soft stop, use “Set point 1”
. This
position is the first stop when the stander is deployed. This submenu also contains all the settings for actuator
movement speeds, acceleration/deceleration, starts and stops. The following table shows all the possible settings.
2.1.3.1
Settings under the “
Actuator Setup
” submenu
Settings
Applicable actuator:
Description
Range
Default setting
Set point 1
For stander actuators only:
Recline actuator (#2), center
mount actuator (#4) and
stander actuators (#5 & 6)
Soft stop angle adjustment in degrees
for recline, center mount and stander
actuators when standing function is
deployed.
Note 1
below
From minimum to
maximum values
under the “General”
submenu.
Recline: 155
Center mount legrest: 21
Stander: -60
Set point 11
Not used. Settings for future development.
Set point 12
Acceleration
For all actuators except the
stander actuator. The standing
module follows a specific
pattern when deployed and
do not consider these settings
Percentage value of speed acceleration
adjustment when actuator starts
moving. For a soft start, the value of this
setting is reduced.
1 % to 100 %
100
Deceleration
Percentage value of speed deceleration
adjustment when actuator stops
moving. For a soft stop, the value of this
setting is reduced
Up Speed
Percentage value of actuator speed
when deploying (opening).
25% to 100%
Down Speed
Percentage value of actuator speed
when retracting (closing).
•
Note 1
: The angle for stander actuators 5 and 6 must be set at the same value.
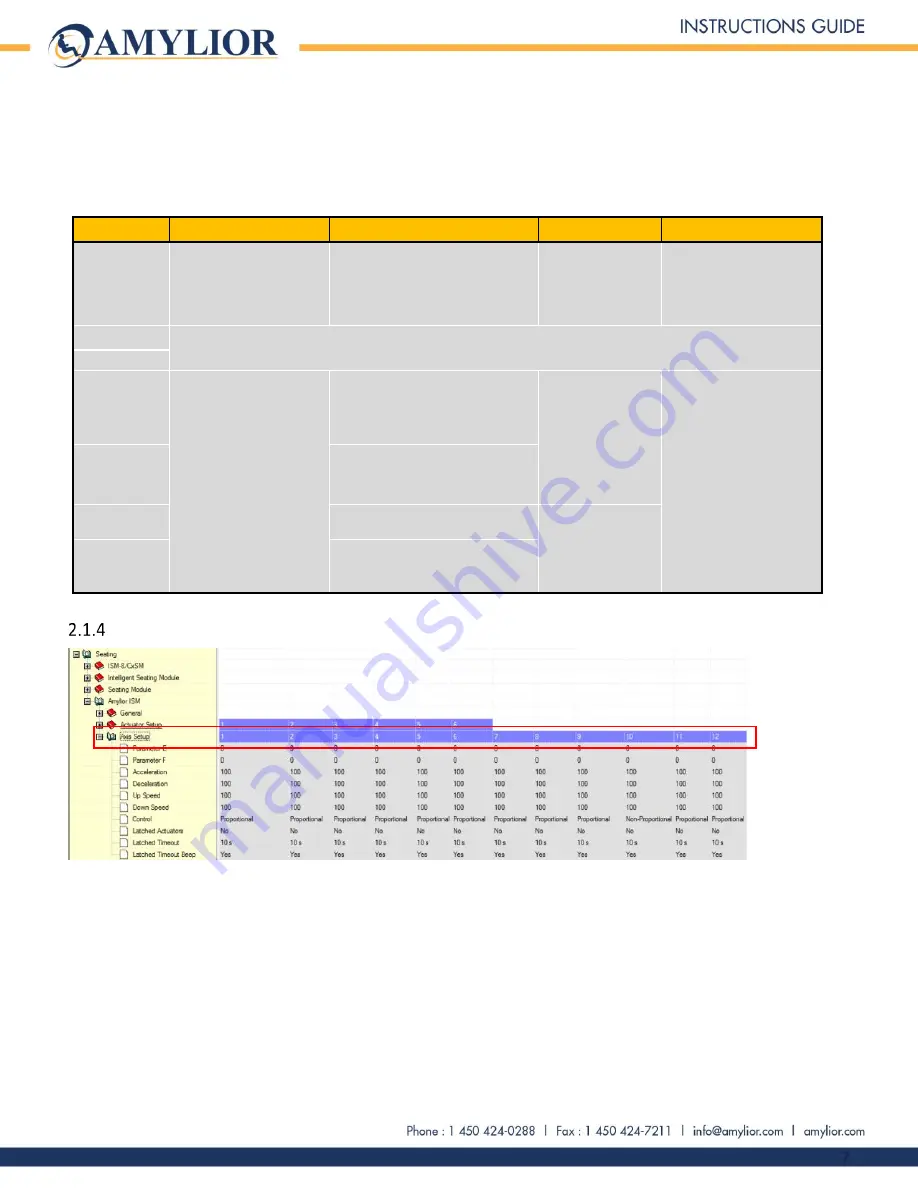
Axis number allocation under the
“Axis Setup
”
submenu.
Under this submenu, there are twelve axis numbers which correspond to a specific function. Each axis can control
between 0 to 6 actuators at the same time according to their predetermined functions. These axes can also
control operations such as standing, memory setting and actuator position recalling.







































































