





























20
SV200 DC Hardware Manual
920-0126A
4/14/2017
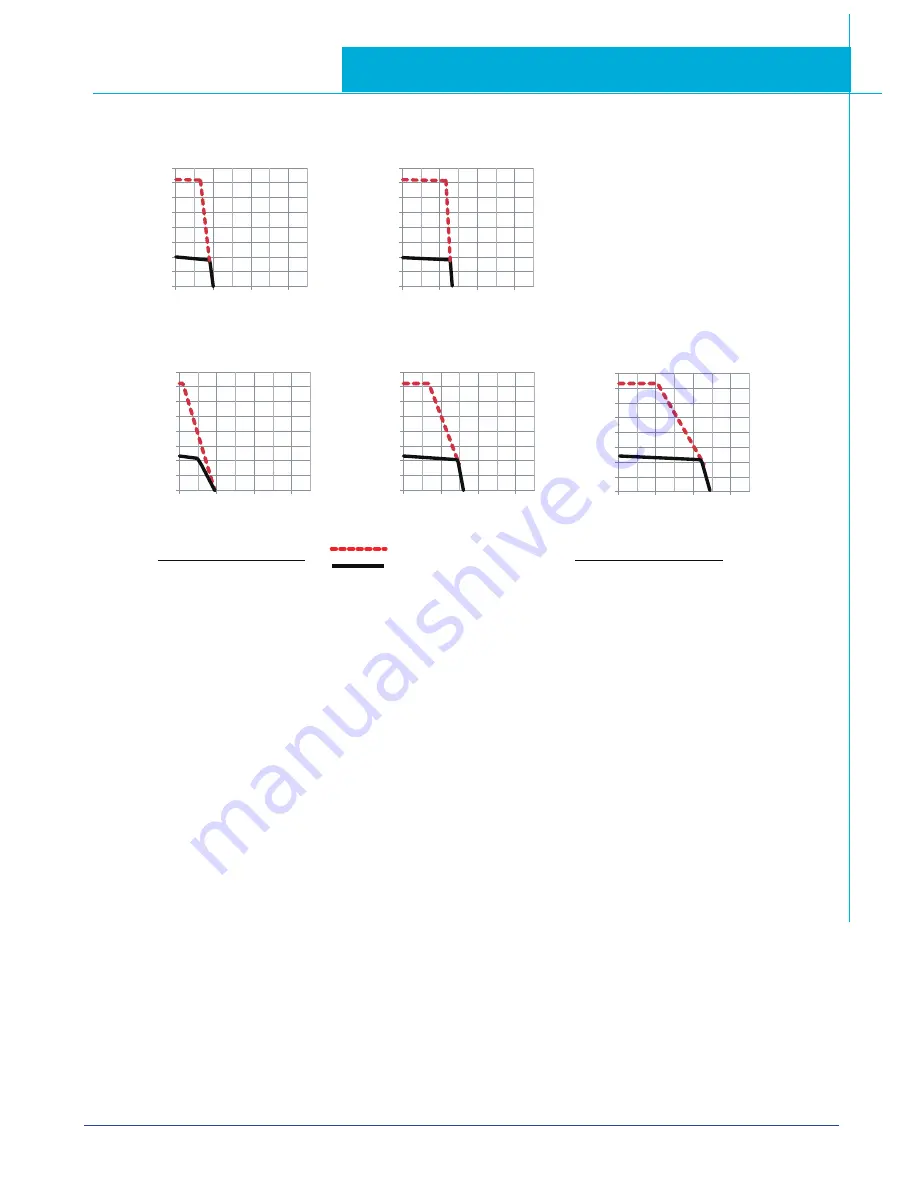
60mm Torque curves--400W
Max. Intermi
�
ent Torque
Max. Con
�
nuous Torque
To
rq
ue
(N
m
)
Speed (rpm)
To
rq
ue
(N
m
)
Speed (rpm)
To
rq
ue
(N
m
)
Speed (rpm)
0
0.5
1
1.5
2
2.5
3
3.5
4
0
2,000 4,000 6,000
DC Bus--24VDC
J0400-404-5-000(400 Watts) -10Amps
0
0.5
1
1.5
2
2.5
3
3.5
4
0
2,000 4,000 6,000
DC Bus--48VDC
J0400-404-5-000(400 Watts) -10Amps
0
0.5
1
1.5
2
2.5
3
3.5
4
0
2,000 4,000 6,000
DC Bus--60VDC
J0400-404-5-000(400 Watts) -10Amps
To
rq
ue
(N
m
)
Speed (rpm)
To
rq
ue
(N
m
)
Speed (rpm)
0
0.5
1
1.5
2
2.5
3
3.5
4
0
2,000 4,000 6,000
DC Bus--48VDC
J0400-305-4-000(400 Watts) -6.9Amps
0
0.5
1
1.5
2
2.5
3
3.5
4
0
2,000 4,000 6,000
DC Bus--60VDC
J0400-305-4-000(400 Watts) -6.9Amps
0
4.4
22.1
25.6
30.9
12.3
17.7
8.9
35.4
0
4.4
22.1
(In-lb
)
Torque
25.6
30.9
12.3
17.7
8.9
35.4
0
4.4
22.1
(In-lb
)
Torque
25.6
30.9
12.3
17.7
8.9
35.4
0
4.4
22.1
(In-lb
)
Torque
25.6
30.9
12.3
17.7
8.9
35.4
0
4.4
22.1
(In-lb
)
Torque
25.6
30.9
12.3
17.7
8.9
35.4
(In-lb
)
Torque







































































