




























5.3.13 Machine thermal overload protection (TM>; 49M)
The thermal overload protection function for machines is used for the thermal capacity monitoring and
protection of electric machines like synchronous and asynchronous motors and generators. This
function can also be used for any applications with single or multiple time constansts, such as inductor
chokes, certain types of transformers and any other static units which do not have active cooling apart
from cables and overhead lines.
The function constantly monitors the instant values of phase TRMS currents (including harmonics up to
31
st
) and calculates the set thermal replica status in 5 ms cycles. The function includes a total memory
function of the load current conditions according to IEC 60255-8.
The function is based on a thermal replica which represents the protected object's thermal loading in
relation to the effective current in the object. The thermal replica includes the calculated thermal
capacity that the "memory" uses; it is an integral function which tells apart this function from a normal
overcurrent function and its operating principle for overload protection applications.
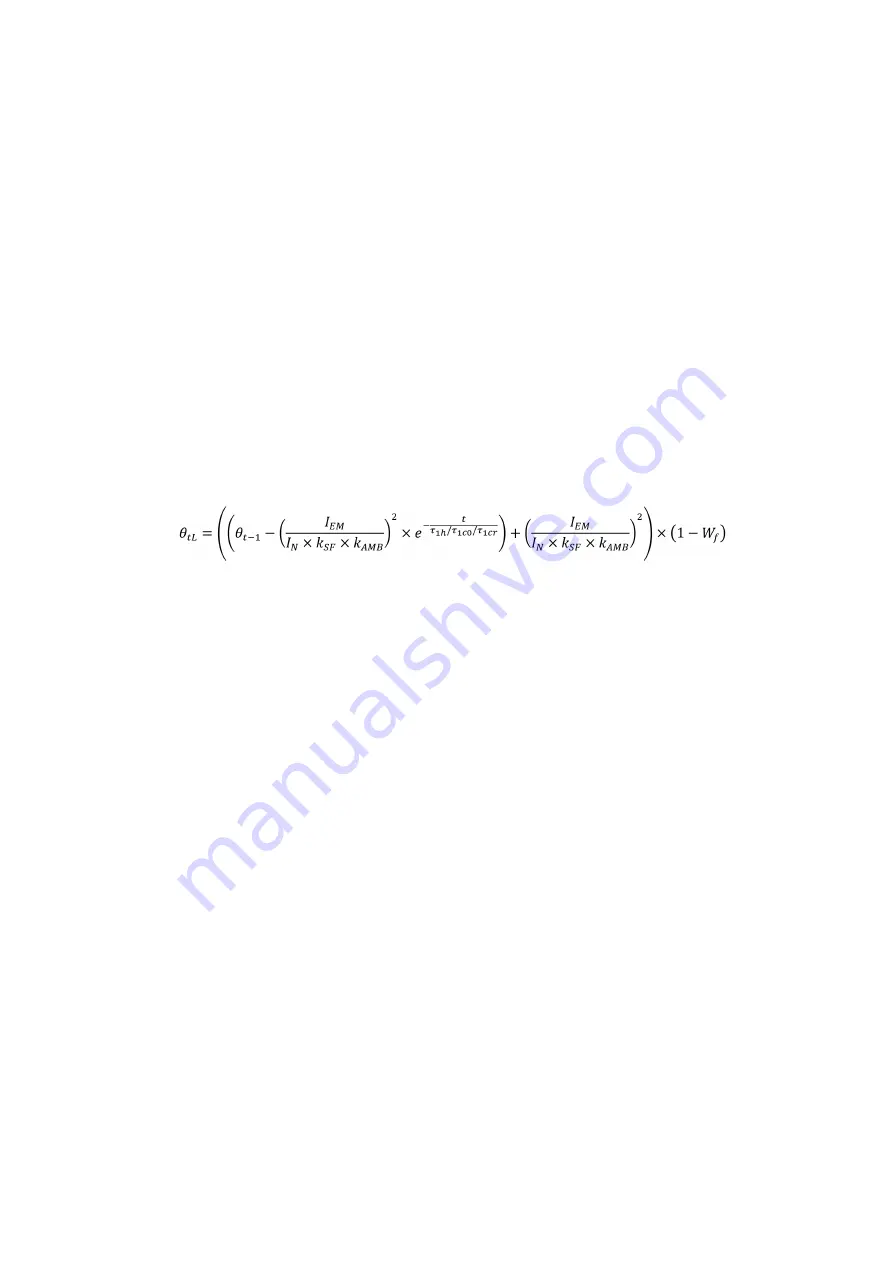
In heating and cooling situations the thermal image for this function is calculated according to the
two equations described below:
Figure. 5.3.13 - 112. Long time constant thermal image calculation.
Where:
• θ
t-1
= Thermal image status in a previous calculation cycle (the memory of the function)
• I
EM
= (see below)
• I
N
= Current for the 100 % thermal capacity to be used (pick-up current in p.u., with this
current t
max
achieved in time t)
• k
SF
= Loading factor (service factor) coefficient, the maximum allowed load current in p.u.,
depending on the protected object
• k
AMB
= Temperature correction factor, either from a linear approximation or from a settable
ten-point thermal capacity curve
• e = Euler's number
• t = Calculation time step in seconds (0.005 s)
• τ
1h
= Long thermal heating time constant of the protected object (in minutes)
• τ
1c0
= Long thermal cooling time constant (motor stopped) of the protected object (in
minutes)
• τ
1cr
= Long thermal cooling time constant (motor running) of the protected object (in minutes)
• W
f
= Correction factor between the times t
1
and t
2
A
AQ
Q-M210
-M210
Instruction manual
Version: 2.04
161







































































