






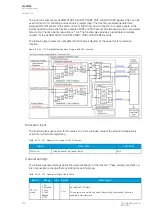





















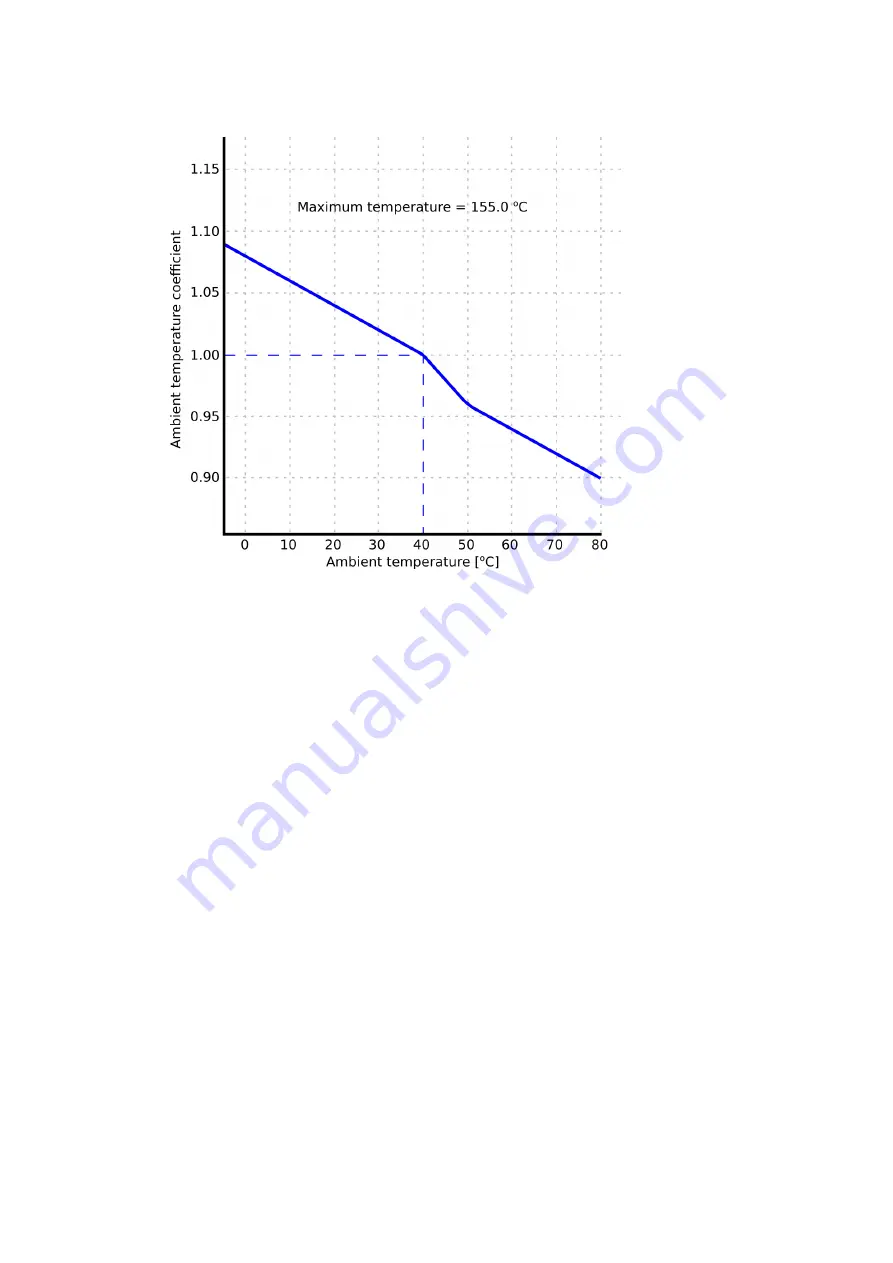
Figure. 5.3.23 - 118. Ambient temperature coefficient calculation (linear approximation, indefinite points).
As mentioned in the previous diagram, the reference temperature for electric machines usually is +40
̊
C; this gives a correction coefficient of 1.00 which can be referred to as the nominal temperature in this
case. The correction curve does not need to be set with as many points as there are available. The
minimum setting is two pairs and the result is a straight line, for which the linear approximation is the
better choice.
Multiple time constants
The thermal behaviour of the single time constant model was presented in the introduction of this
chapter. However, it is not the optimal solution for electric machines, especially when the motor is
stopped and started frequently. The following explains the main reasons as well as the differences
between the single and the multiple time constant models.
By the terms of electrical machine the thermal behavior and time constants varies in between of
heating and cooling as well as at certain point within heating and cooling when the loading current is
decreased or increased instantly to minimum or maximum. In practice this means that the thermal
replica needs to have more settable time constants than one common constant for heating and
cooling, as is the case with single time constant objects like cables.
The most common practice is to separate the minimum settable time constants for heating and
cooling. The main reason for this is fairly simple: the rotating machine (especially a motor) usually has a
cooling fan in the same shaft with its drive, and it cools both the motor and its own surface when the
motor is running. Unfortunately, the cooling stops when the motor stops, and the time constant
becomes longer as the heat is slower to dissipate into the surrounding air. The cooling time constant
(τ
c
) may be the same as the heating time constant (τ
h
) if the machine has active cooling. Additionally,
the starting method (DOL/Soft start/Y-delta) also tells whether there is a need for another time
constant (locked rotor, overloading situations) in order to achieve a suitable thermal image for the
machine.
The following figure presents the various differences to consider when solve the time constants in the
motor (as compared to single time constant objects like cables).
A
AQ
Q-M255
-M255
Instruction manual
Version: 2.06
© Arcteq Relays Ltd
IM00020
223
Summary of Contents for AQ-M255
Page 1: ...AQ M255 Motor protection IED Instruction manual...
Page 2: ......






























































