


























2.2.2 Detection range of the proximity-sensors
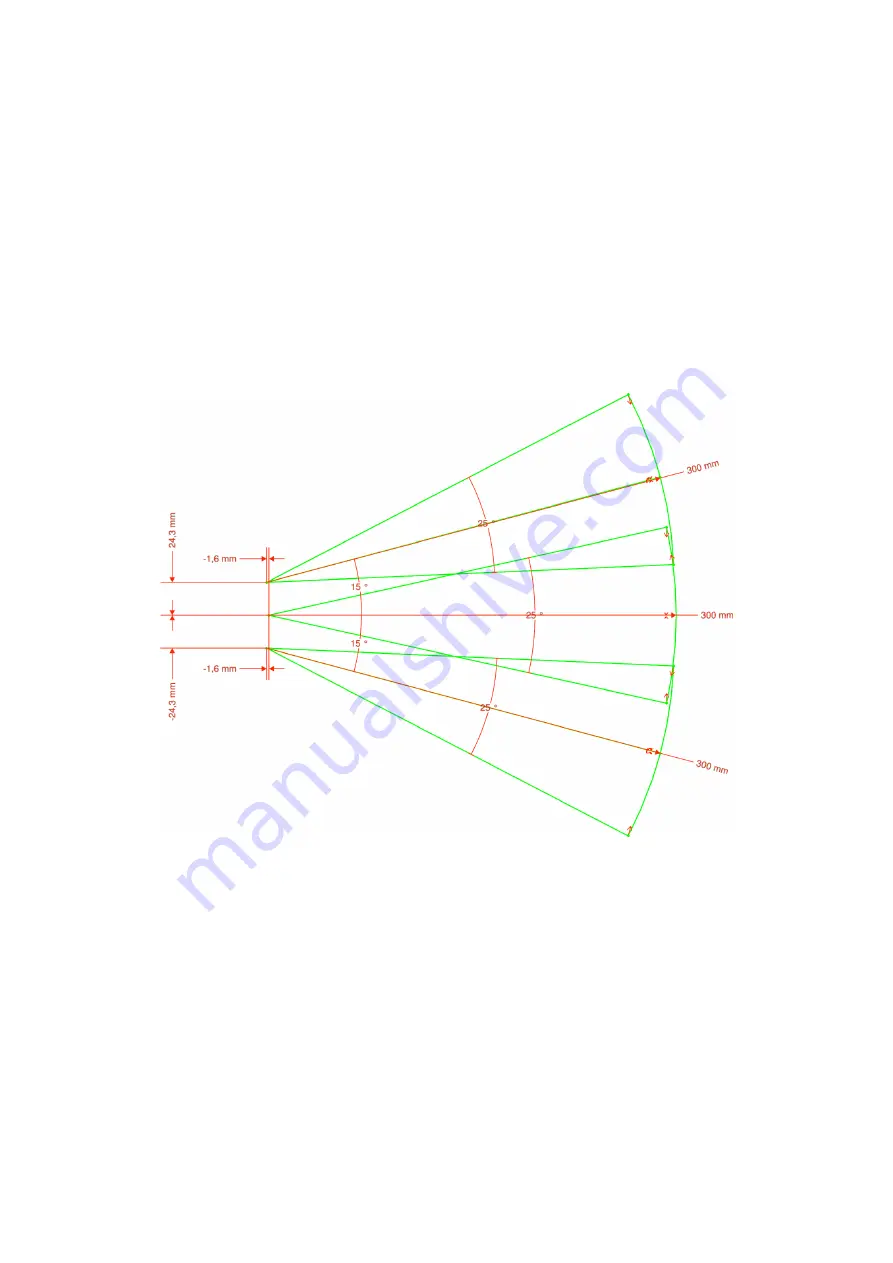
The sensors have a detection range (FoV) of 25° and a range of approx. 30 cm. Distances below 10 cm are
displayed as zero. This ensures that the robot can avoid the obstacles without having to go backwards.
The two external sensors are twisted at +15° or -15° to the robot zero axis to achieve a wider angle of
detection. The representation of the resulting detection range shows a slight overlap of the individual sensors.
This ensures that all obstacles in the travel path are recognized.
The picture also applies to the optional rear sensors.
FoV Proximity sensors (Representation of all three sensors):
Figure 2.2
Field of View of the proximity sensors
AREXX Engineering & JM³ Engineering
Version: 1.3.1
October 27, 2017
Page: 6







































































