





























4.3 Bootload hex-files (C/C++ code)
To upload a self-written program “myProg.hex” or upgrade the Bootloader “bootloader-xx.hex” into the
micro-controller you must have installed the
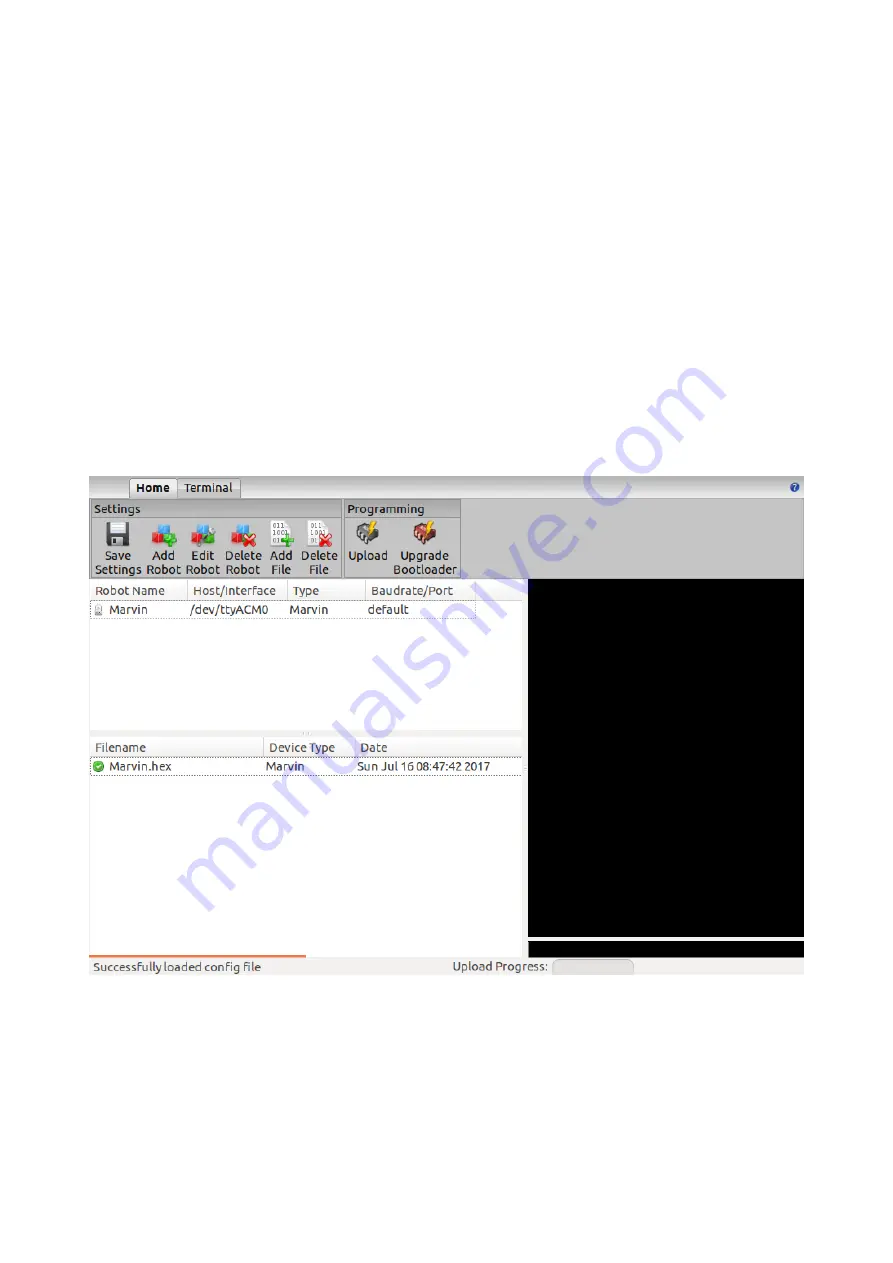
JM3 Robot-Tool
before you can continue (Figure 4.2).
Hint:
The JM3 Robot-Tool differentiates two types of hex programming:
• “Upload” - iRP-Firmware or application program code upload, like “irpxxx.hex”
file or own C++ program code “myprogram.hex”.
• “Upgrade Bootloader” - the Blootloader itself can be updated, a file will look like
“bootloader-xx.hex”.
Figure 4.2
The JM3 Robot-Tool
4.3.1 iRP Firmware update
The procedure for a iRP Firmware update is described in this chapter.
AREXX Engineering & JM³ Engineering
Version: 1.3.1
October 27, 2017
Page: 36



































































