

























-17-
changes.
Lock Dir/Heig
: Lock direction and height (Cruise flight):
Under balance mode,
when CH3>20% CH1 and CH2 stick back to center,
height and direction will be locked and keep straight &constant-height flight.
Aileron and elevator can also be controlled through CH1 and CH2.
Lock Dir
:
lock direction only
Lock Heg
:
lock height only
Semi-Balance Mode:
When the CH1 and CH2 of rocker is less than 50%, the
plane is in Balance Mode. When the rocker is more than 50%, the plane is in
Gyro Mode.
Hover Yield
Switched to Hover mode, the plane will nose up , if the plane cannot
maintain front/backward position ,increase this value so the elevator
surface will move up a little angle (nose down).
Attitude Source
"GPS":Attitude acquisition through GPS
"AR PRESS":Attitude acquisition through barometer(recommend)
Hover Roll trim
Switched to Hover mode, the plane will nose up , if the plane cannot
maintain right/left position ,adjust this value
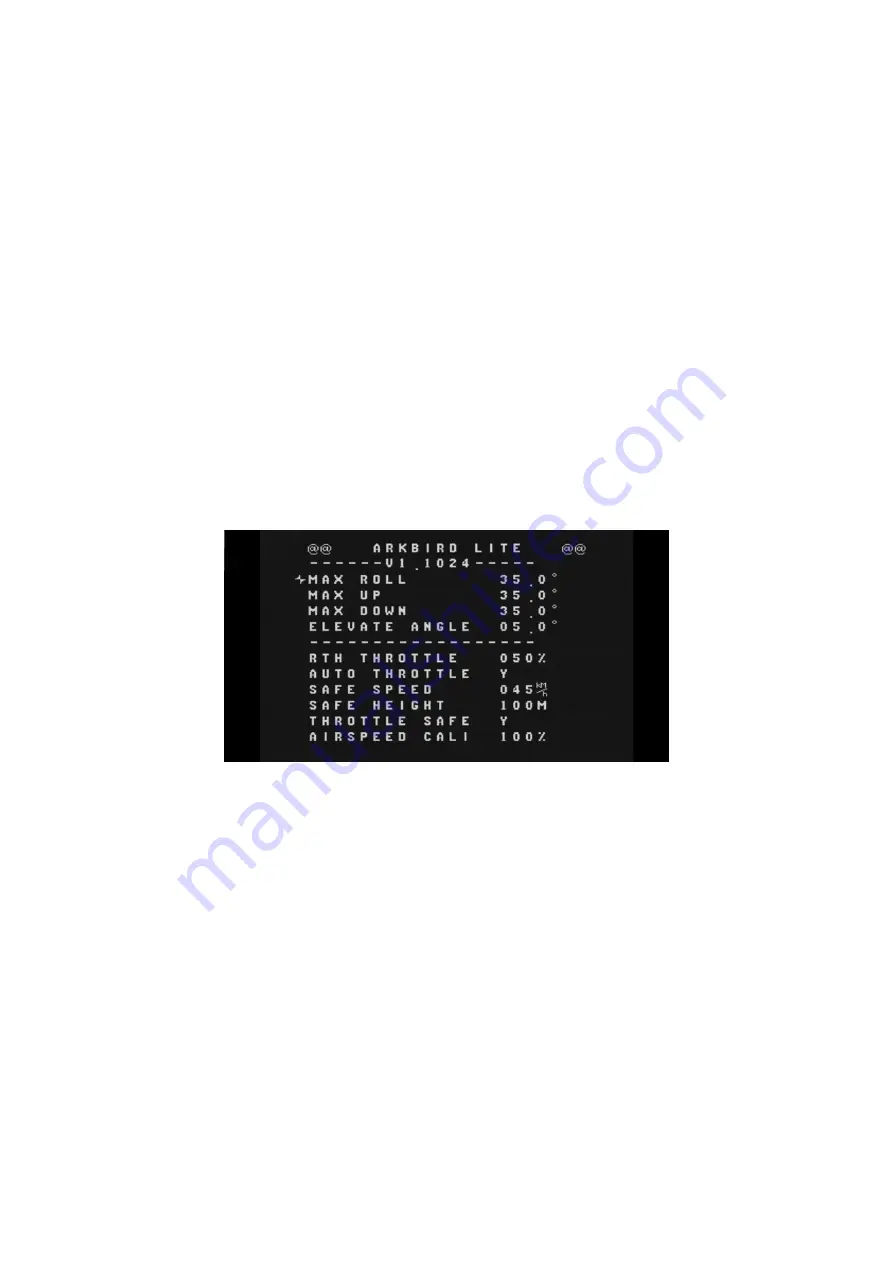
Set RTH Parameters
Max Roll
Max roll angle while return to home, 20 to 40 degree recommended.
Max UP
Max pitch (up) angle while return to home, 20 to 40 degree recommended.
Max Down
Max pitch (down) angle while return to home, 20 to 35 degree recommended
Elevate Angle
Level flight’s elevate angle, 3 to 15 degree recommended. Please adjust this value
while pitch up or down to have level flight even the stick is back to center.
-------------------------------------------------------------------------------------------------------------------
RTH Throttle
Return to home throttle (%)
AUTO Throttle
The autopilot will use the throttle value of level flight automatically as return to
home throttle. (Default)
Safe Speed
Minimum speed of return to home (when speed is less than the certain value, it will
accelerate throttle in proportion to avoid lost while being upwind.)
Safe Height
Safe Height (The minimum height of return to home, 80 to 200 m recommended.)
Throttle Safe
Throttle Safe (When distance and height are less than 30m, for safety concern,
there is no throttle output under RTH Mode.)
Airspeed cali
Calibarate the airspeed sensor, input the correct percentage % after landing to
calibrate the displayed airspeed value.







































































