



























Communication extension card
-10-
Reference value (REF): The second to twelfth words in a PZD task packet are the main settings. The main
frequency settings are provided by the main setting signal source.
Astraada DRV-28 series VFD.
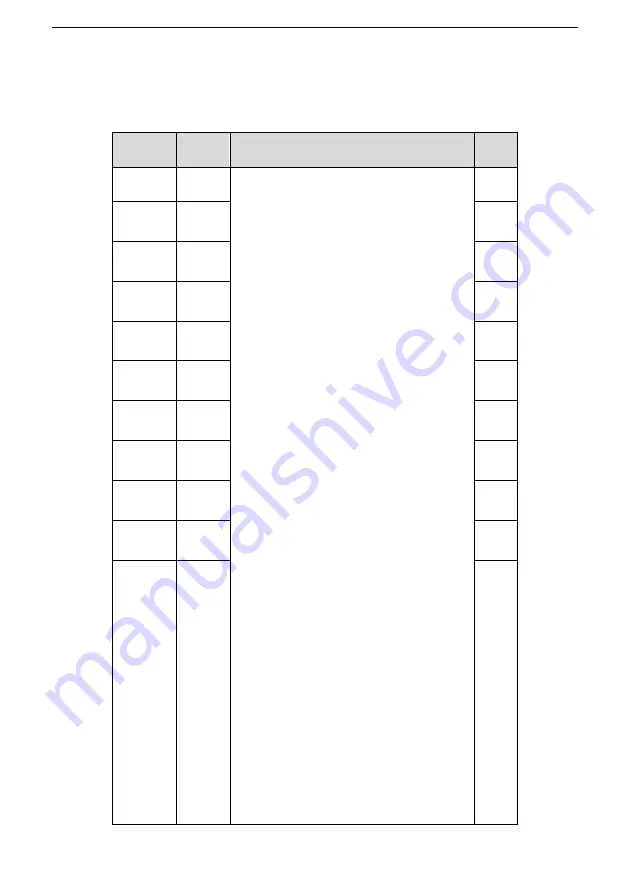
Table 2-6 Settings of Astraada DRV-28 series
VFD
Function
code
Word
Value range
Default
value
P15.02
Received
PZD2
0: Invalid
1: Set frequency (0
–
Fmax, unit: 0.01 Hz)
2: PID reference (0
–
1000, in which 1000
corresponds to 100.0%)
3: PID feedback (0
–
1000, in which 1000
corresponds to 100.0%)
4: Torque setting (-3000
–
+3000, in which 1000
corresponds to 100.0% of the rated current of the
motor)
5: Setting of the upper limit of forward running
frequency (0
–
Fmax, unit: 0.01 Hz)
6: Setting of the upper limit of reverse running
frequency (0
–
Fmax, unit: 0.01 Hz)
7: Upper limit of the electromotive torque (0
–
3000, in which 1000 corresponds to 100.0% of the
rated current of the motor)
8: Upper limit of the brake torque (0
–
3000, in
which 1000 corresponds to 100.0% of the rated
current of the motor)
9: Virtual input terminal command, 0x000
–
0x3FF
(corresponding to S8, S7, S6, S5, HDIB, HDIA, S4,
S3, S2, and S1 in sequence)
10: Virtual output terminal command, 0x00
–
0x0F
(corresponding to RO2, RO1, HDO, and Y1 in
sequence)
11: Voltage setting (for V/F separation)
(0
–
1000, in which 1000 corresponds to 100.0% of
the rated voltage of the motor)
12: AO output setting 1 (-1000
–
+1000, in which
1000 corresponds to 100.0%)
13: AO output setting 2 (-1000
–
+1000, in which
1000 corresponds to 100.0%)
14: MSB of position reference (signed number)
15: LSB of position reference (unsigned number)
16: MSB of position feedback (signed number)
17: LSB of position feedback (unsigned number)
18: Position feedback setting flag (position
feedback can be set only after this flag is set to 1
and then to 0)
0
P15.03
Received
PZD3
0
P15.04
Received
PZD4
0
P15.05
Received
PZD5
0
P15.06
Received
PZD6
0
P15.07
Received
PZD7
0
P15.08
Received
PZD8
0
P15.09
Received
PZD9
0
P15.10
Received
PZD10
0
P15.11
Received
PZD11
0
P15.12
Received
PZD12
0







































































