























AS64 series AC servo drive Appendix
-310-
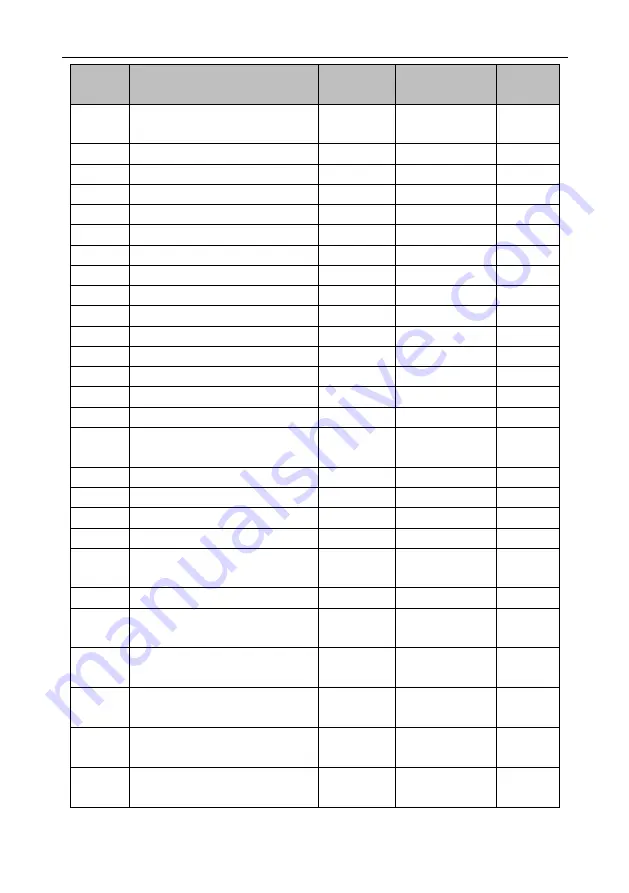
Function
code
Parameter
Unit
Setting range
Applicable
mode
R0.27
EtherCAT clock synchronization
status
-
0
–1
PST
R0.28
CANopen status machine
-
0
–18
PST
R0.30
System status
-
0
–6
PST
R0.31
IGBT status
-
0
–1
PST
R0.32
Current mode
-
0
–2
PST
R0.33
Power-on time
s
0–(2
31
-1)
PST
R0.34
Enabling time
s
0–(2
31
-1)
PST
R0.35
DSP version no.
-
0.00
–10.00
PST
R0.36
FPGA version no.
-
0.00
–10.00
PST
R0.38
Drive SN 1
-
0
–65535
PST
R0.39
Drive SN 2
-
0
–65535
PST
R0.40
Drive SN 3
-
0
–65535
PST
R0.41
Drive SN 4
-
0
–65535
PST
R0.42
Drive SN 5
-
0
–65535
PST
R0.43
Drive SN 6
-
0
–65535
PST
R0.44
Absolute position in single grating
ruler (or encoder 2) turn
pulse
0–(2
31
-1)
PST
R0.45
Speed feedback from encoder 2
r/min
-9999.9
–9999.9
PST
R0.46
Speed observer detection
r/min
-9999.9
–9999.9
PST
R0.47
Speed observer feedback
r/min
-9999.9
–9999.9
PST
R0.48
Torque from
disturbance observer
%
-1000.0–1000.0
PST
R0.49
Fully-closed loop
vibration
suppressor compensation
r/min
-9999.9
–9999.9
PST
R0.51
Real-time load inertia ratio
%
0–10000
PST
R0.52
Accumulated grating ruler (or
encoder 2) position feedback (32-bit)
pulse
-(2
31
-1)–(2
31
-1)
PST
R0.53
Gantry synchronization
position
deviation
reference unit
-(2
31
-1)–(2
31
-1)
PST
R0.54
Grating ruler (or encoder 2) position
feedback
pulse
0–(2
31
-1)
PST
R0.55
Encoder turn deviation after multiturn
position cleared
-
-(2
31
-1)–(2
31
-1)
PST
R0.56
Encoder feedback deviation after
multiturn position cleared
pulse
-(2
31
-1)–(2
31
-1)
PST







































































