





























AS64 series AC servo drive Function codes
-109-
P1.08
Data size
16bit
Data format
DEC
Modbus address
1216, 1217
CANopen address
0x2108, 0x00
6.2.2 Self-adaptive vibration control
P1.19
Resonance
detection
sensitivity
Setting range
Default
Unit
Applicable
mode
0.2–100.0
5.0
%
P
S
T
This parameter specifies the sensitivity of the automatic detection on mechanical resonant
frequency. A smaller value of this parameter indicates higher sensitivity to the resonance.
P1.19
Data size
16bit
Data format
DEC
Modbus address
1238, 1239
CANopen address
0x2113, 0x00
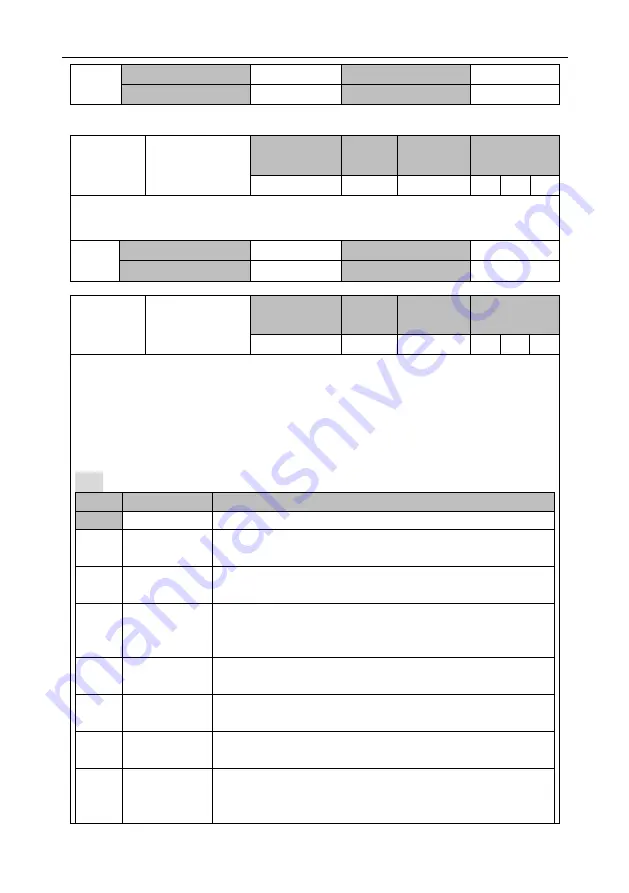
P1.20
Resonance
detection mode
Setting range
Default
Unit
Applicable
mode
0–7
0
-
P
S
T
This parameter specifies the working mode of resonance detection, resonant frequency presumed
by the self-adaptive notch filter, and action after presumption.
If the function of automatically detecting the mechanical resonant frequency is valid (that is, this
parameter is set to 1, 2, or 3), the system automatically collects data to conduct mechanical
resonant frequency analysis and saves results to P1.21 and P1.22. You can set the notch filter
frequency according to the settings of P1.21 and P1.22 to eliminate the mechanical resonance.
Note:
You are recommended to disable the function after the gain adjustment is complete.
Setting
Function
Meaning
[
0
]
Invalid
All parameters associated with the notch filter remain unchanged.
1
One notch filter
valid
The parameters associated with the third notch filter are updated
according to the self-adaptive result.
2
Two notch filters
valid
The parameters related to the third and fourth notch filters are
updated according to the self-adaptive result.
3
Resonant
frequency test
mode
The mechanical resonant frequency is detected automatically but
the parameters associated with notch filters are not set.
4
Clearing notch
filter parameters
The parameters associated with the four notch filters are restored to
the default values.
5
Notch filter 3 →
Notch filter 1
The parameters of the third notch filter to are automatically copied to the
first notch filter and then restored to the default values.
6
Notch filter 4 →
Notch filter 2
The parameters of the fourth notch filter to are automatically copied to
the first notch filter and then restored to the default values.
7
Notch filters 3
and 4 → Notch
filters 1 and 2
The parameters of the third and fourth notch filters to are automatically
copied to the first and second notch filters and then restored to the
default values.







































































