





























V4.5
©2015-2019 AUBO.All rights reserved.
136
Type of Move
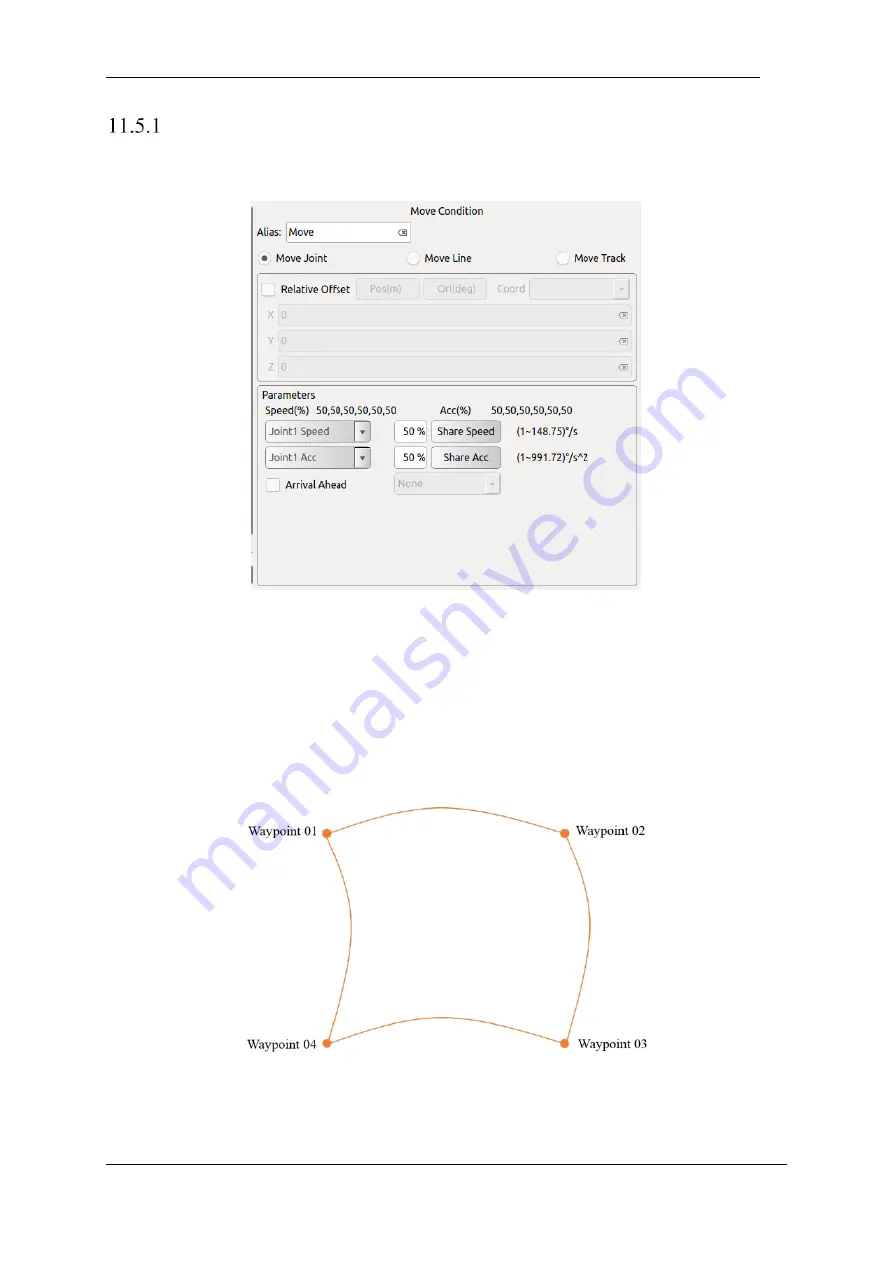
Move Joint
Figure 11-14 Move Joint
According to the joint angles between waypoints and configured motor’s limitation of speed and
acceleration (six manipulators’ common parameters), all the joints move simultaneously to the target
waypoint as fast as they can (Both initial velocity and final velocity are 0). The end moving path
between these waypoints during the move can be observed on Track display. If you want manipulator
to move quickly between waypoints and without consideringthe TCP’s moving path, this movement
type is a good choice.
Move Joint
applies for the enough space and moves by the fastest way. As
shown below.
Figure 11-15 Move Joint track
Maximum speed and acceleration of joint:
➢
Maximum speed of motor is 3000rpm. It is recommended that the speed is no more than 2800rpm in
Summary of Contents for AUBO-i10
Page 1: ...USER MANUAL AUBO i10 CB4 Please read this manual carefully before using the product...
Page 2: ......
Page 10: ...V4 5 2015 2019 AUBO All rights reserved vi...
Page 26: ...V4 5 2015 2019 AUBO All rights reserved 22...
Page 44: ...V4 5 2015 2019 AUBO All rights reserved 40...
Page 56: ...V4 5 2015 2019 AUBO All rights reserved 52...
Page 87: ...V4 5 2015 2019 AUBO All rights reserved 83...
Page 127: ...V4 5 2015 2019 AUBO All rights reserved 123...
Page 161: ...V4 5 2015 2019 AUBO All rights reserved 157 Figure 11 43 script file editor...
Page 179: ......







































































