





























V4.5
©2015-2019 AUBO.All rights reserved.
27
5.
ROBOT HARDWARE COMPOSITION
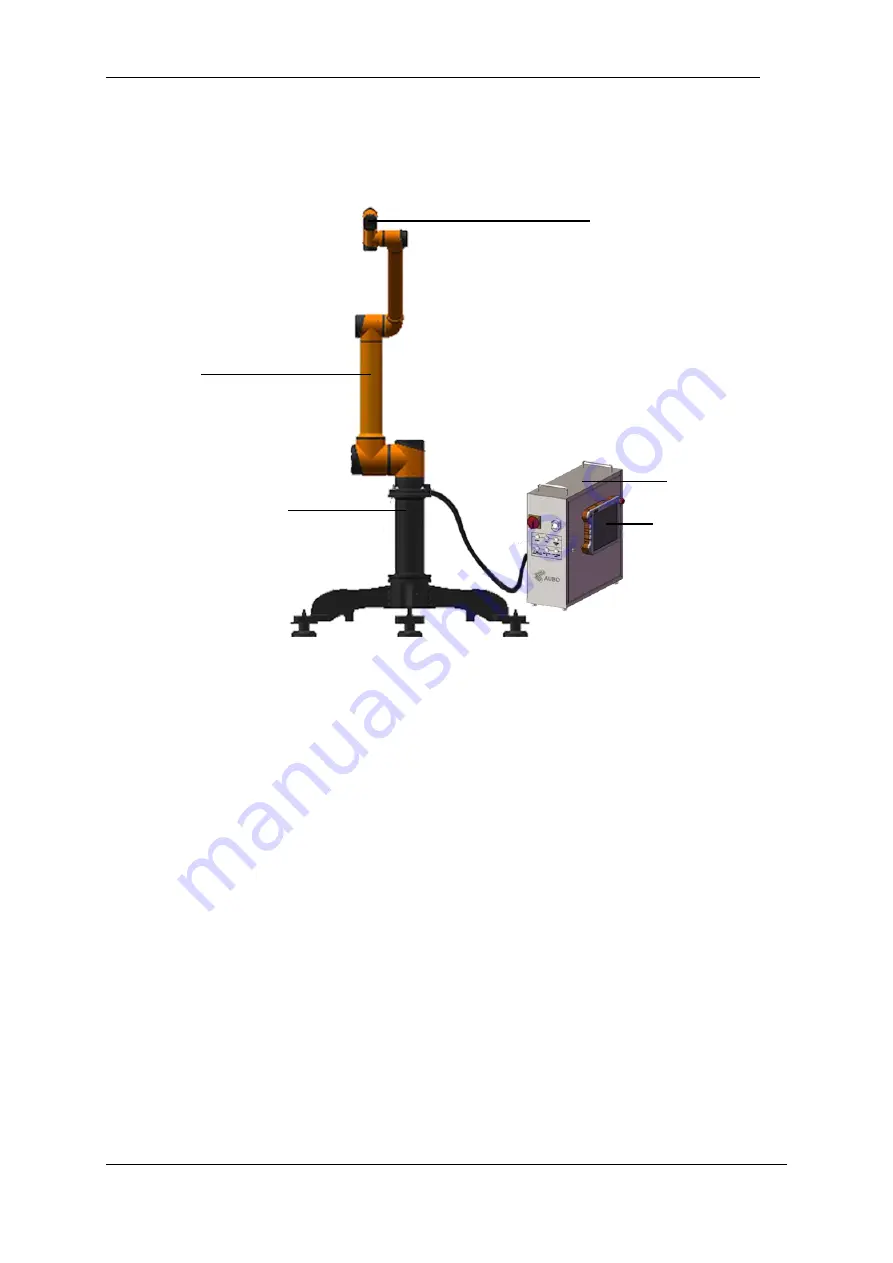
Figure 5-1 AUBO-i10 robot
As shown in figure 5.1, The AUBO-i10 robot system consist of a manipulator, a control box(which can
choose a variety of models), a manipulator base and a teach pendant. The manipulator imitates human which
has six joints and each joint represents a degree of freedom. As shown in figure5.2, manipulator’s joint
includes a robot base (A), a shoulder (B), an elbow (C), a wrist1(D) ,a wrist2(E) and a wrist3(F). The
manipulator base is used for the robot body and the base connection. End-effector is used to connect
manipulator and tool. Aluminium pipe is used to connect shoulder and elbow or elbow and wrist. Through
the AUBOPE user interface or hand-guiding, users can control the rotation of every joint and move end-
effector to any poses.
Manipulator
Manipulator base
Control box
Teach pendant
Flange
Summary of Contents for AUBO-i10
Page 1: ...USER MANUAL AUBO i10 CB4 Please read this manual carefully before using the product...
Page 2: ......
Page 10: ...V4 5 2015 2019 AUBO All rights reserved vi...
Page 26: ...V4 5 2015 2019 AUBO All rights reserved 22...
Page 44: ...V4 5 2015 2019 AUBO All rights reserved 40...
Page 56: ...V4 5 2015 2019 AUBO All rights reserved 52...
Page 87: ...V4 5 2015 2019 AUBO All rights reserved 83...
Page 127: ...V4 5 2015 2019 AUBO All rights reserved 123...
Page 161: ...V4 5 2015 2019 AUBO All rights reserved 157 Figure 11 43 script file editor...
Page 179: ......







































































