





























V4.5
©2015-2019 AUBO.All rights reserved.
94
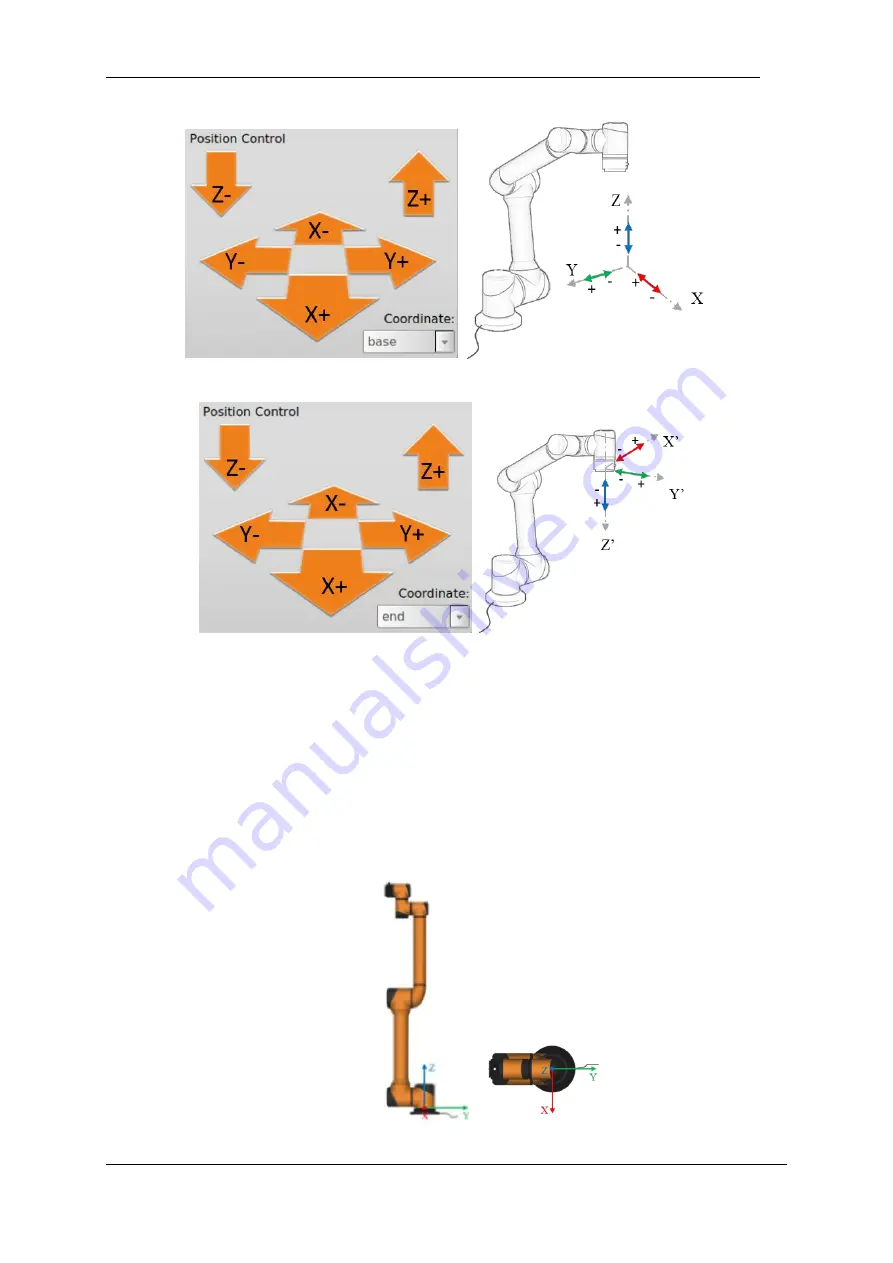
Figure 10-9 Position control
(
base
)
Figure 10-10 Position control
(
end
)
9 Coordinate system
The user can control the motion state of the robot based on the base coordinate system, the end coordinate
system, and the user-defined coordinate system.
base
Select the base coordinate system (base) to control the robot on the teach pendant interface, and the robot
will move according to the coordinate system as shown below.
Figure 10-1 base
Summary of Contents for AUBO-i10
Page 1: ...USER MANUAL AUBO i10 CB4 Please read this manual carefully before using the product...
Page 2: ......
Page 10: ...V4 5 2015 2019 AUBO All rights reserved vi...
Page 26: ...V4 5 2015 2019 AUBO All rights reserved 22...
Page 44: ...V4 5 2015 2019 AUBO All rights reserved 40...
Page 56: ...V4 5 2015 2019 AUBO All rights reserved 52...
Page 87: ...V4 5 2015 2019 AUBO All rights reserved 83...
Page 127: ...V4 5 2015 2019 AUBO All rights reserved 123...
Page 161: ...V4 5 2015 2019 AUBO All rights reserved 157 Figure 11 43 script file editor...
Page 179: ......







































































