




























25
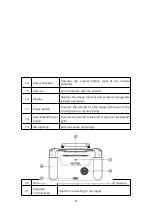
Intelligent Flight Control System
Module
Description
IMU
Uses a 3-axis gyroscope and a 3-axis accelerometer to
measure the acceleration and angular velocity.
Compass
Measures the geomagnetic field and provides reference
information on the heading of the aircraft.
GNSS receiver
Receives signals from global navigation satellite systems and
determines 3-D position (latitude, longitude and altitude) of the
aricraft.
Barometer
Measures the atmospheric pressure and determines the
altitude of the aircraft.
Ultrasonic sensor
Measures the distance between the aircraft and the ground.
Binocular vision
sensing system
Supports the omnidirectional binocular vision (front, rear, left,
right, up, and down).
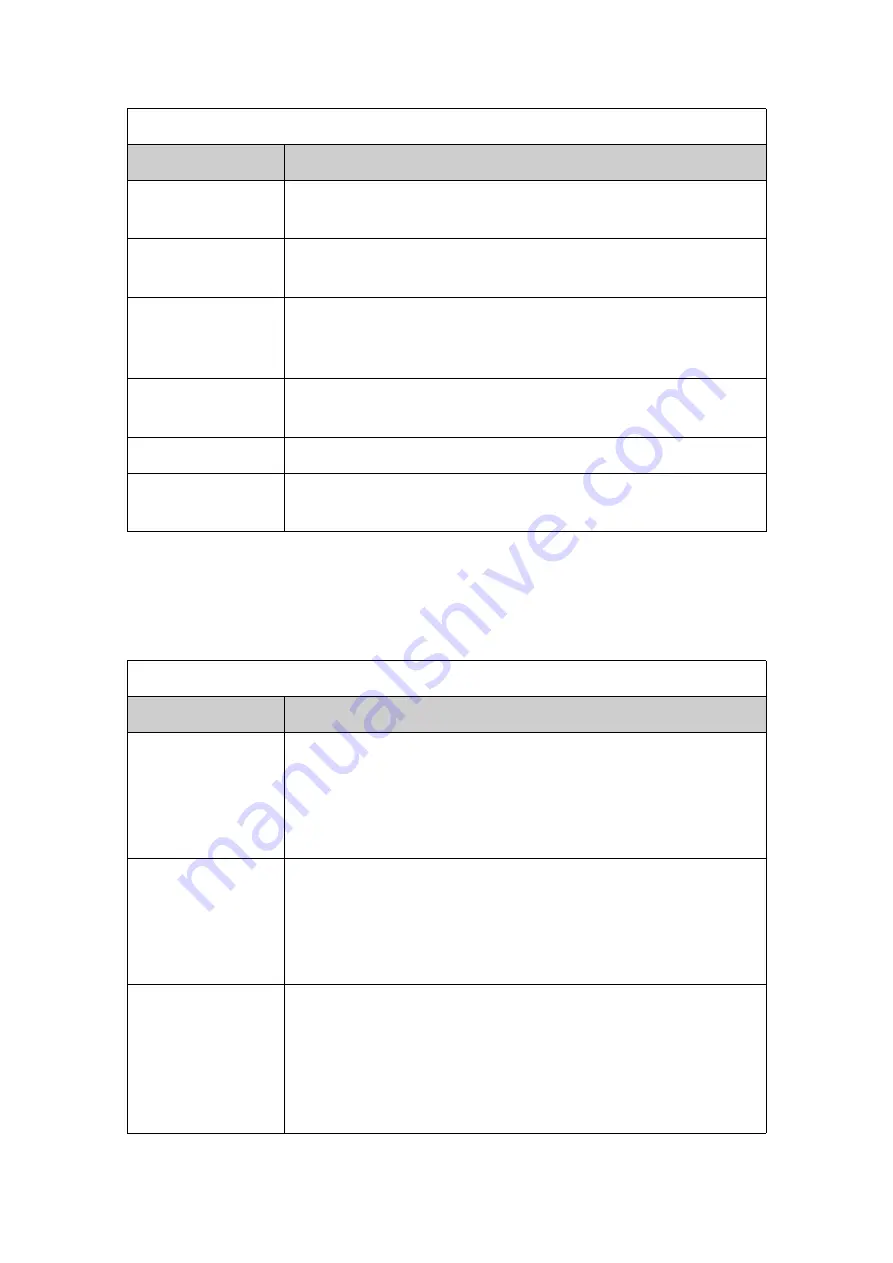
1. Flight Mode
The aircraft can automatically switch between three flight modes based on the
availability of GPS signals and flight conditions.
Flight Mode
Flight Mode
Description
GPS mode
The aircraft will activate the GPS mode once it detects a
sufficient GNSS signal. In GPS mode, with the assistance of
the front and rear vision systems, the aircraft can locate and
avoid obstacles. GPS provides stable and smooth flight control
and supports features such as return to home and failsafe.
ATTI mode
The aircraft automatically changes to ATTI mode when the
GPS signal is weak and the vision systems are unavailable as a
result of the poor light conditions. The obstacle avoidance
feature is disabled and the aircraft controls the altitude through
a barometer.
Starpoint mode
In this mode, the aircraft uses the vision positioning, which has
a high requirement on the environment and altitude. The
surrounding environment must have sufficient light and the
ground texture must be clear. In addition, the aircraft must fly
at an altitude that can be sensed by the vision systems.
Otherwise, the aircraft enters the ATTI mode.





























































