





























Owner Installation Instructions
GDO-10V2 Toro
™
27
Pedestrian Access Position
After completing the limit setup procedure the
Pedestrian Access position is automatically set to
a position which is approximately in the middle of
the door travel. The position can be manually set
by following the SETTING PEDESTRIAN POSITION
procedure.
Step 12.1 - Setting Pedestrian Position
Drive and stop the door at the desired Pedestrian
Access position by using a transmitter or wall
control unit.
Press PREV to navigate to Menu 10.
Press SET. MENU 10.1 will be displayed.
Press NEXT to go to MENU 10.3
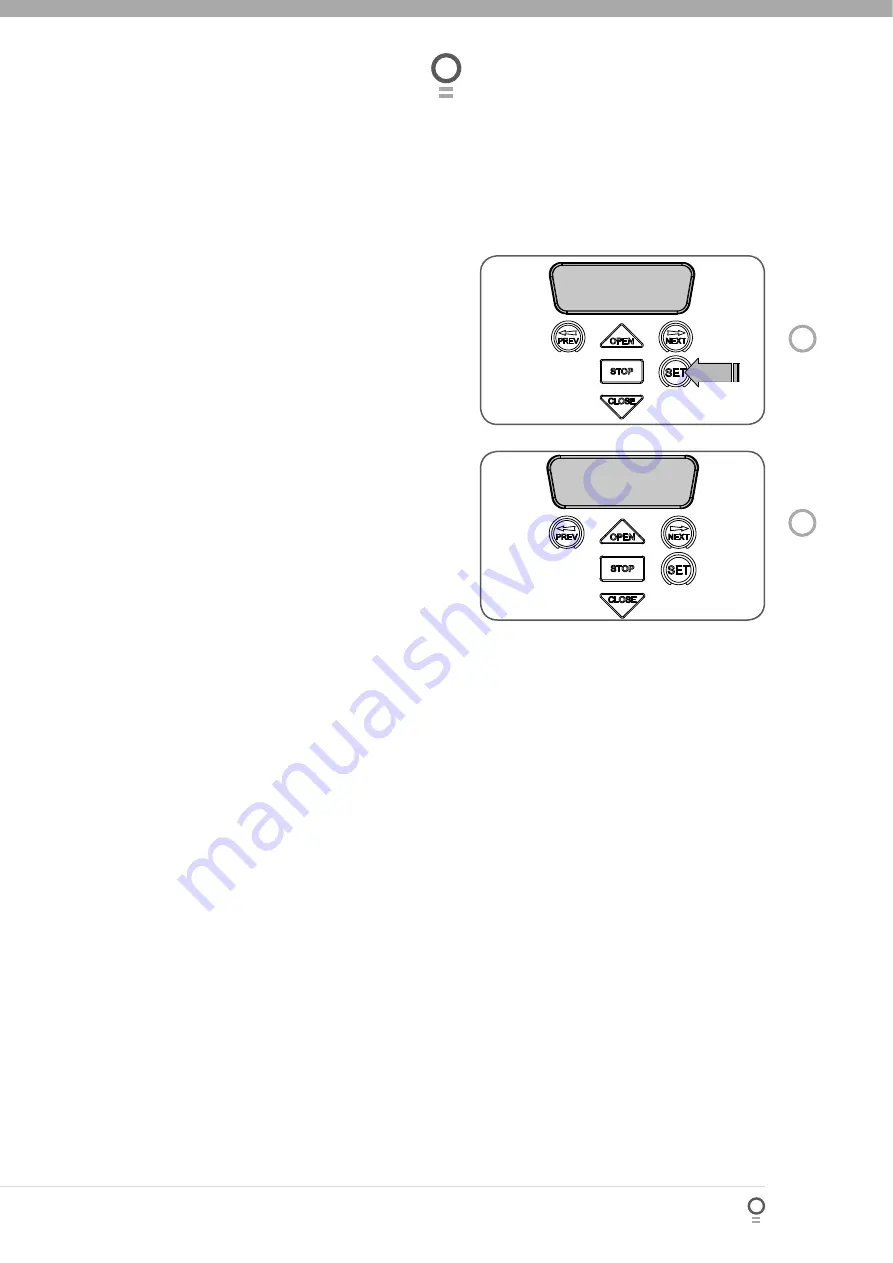
Press SET on the wall control unit to save the
Pedestrian Access position
(Fig. 48)
.
Press the STOP button to exit to the main screen.
Step 12.2 - Checking Pedestrian Position
When activated by a transmitter button which is coded
as Ped mode, the opener drives the door to the preset
position from either above or below. Ped Mode’s active
status is indicated on the display
(Fig. 49)
. If a Ped Mode
button is pressed while the door is moving, the door will
stop. If a Ped Mode button is pressed when the door is
in the Ped position, then the door will close.
Errors During Setting Of Travel Limits And
Pedestrian Position
During the above procedure many error checks are
preformed. If an error is detected, a message will be
displayed indicating the error.
1.
2.
3.
4.
5.
6.
Setting Pedestrian Position
MENU 10.3
Set Pedestrian
PR E S S
48
fi g
Ped’n Access
FRI 11:06:44 STD
49
fi g
Standard Operating Modes
This section describes the standard operation of the
control board with the factory set default values.
Motor Control
The controller drives the motor in the direction
determined by the control inputs. Once a cycle is
started the motor will continue to travel until:
1. The controller is instructed to stop by a control input;
or;
2. The travel limit of the opener is reached; or,
3. The motor is obstructed, overloaded or stalls. When
the control inputs instruct the control board to
change the motor direction, the controller brakes the
motor, waits for the door to stop moving and then
starts the motor in the opposite direction.
Motor Obstruction Detection
If the door is obstructed while opening, it will
stop. If it is obstructed while closing, the door
will stop and then reverse to the open position.
Obstruction detection monitors the motor’s
speed and compares it to the “normal” speed
profi le for the motor. If the speed of a motor
falls below “normal” then the motor is said to
be obstructed. In addition to the normal motor
obstruction detection, motor overload and stall
detection is provided to protect the door and
opener.







































































