







Page 5
DURA
pulse
GS20 AC Drive Quick-Start Guide – 1st Ed, Rev C 03/03/2022
DURA
pulse
GS20 AC Drive Quick-Start Guide
GS20_QSP 1st Edition, Rev C 03/03/2022
DURA
pulse
GS20 Parameter Settings – Quick Configuration (continued)
Parameter
Description
Range
Default
User
Group
#
07 10
Restart after fault action
0=Stop operation
1=Speed tracking by current speed
2=Speed tracking by minimum output
frequency
0
07 11
Number of times of restart after fault
0–10
0
07 19
Fan cooling control
0=Fan is always ON
1=Fan is OFF after the AC motor drive stops
for one minute
2=Fan is ON when the AC motor drive runs,
fan is OFF when the AC motor drive stops
3=Fan turns ON when temperature (IGBT)
reaches approximately 600
°
C
3
08 00
Terminal selection of PID feedback
0=No function
1=Negative PID feedback: by analog input
(P03.00, P03.01)
2=Negative PID feedback: by single- phase
input (DI7), without direction (P10.16=5)
4=Positive PID feedback: by analog input
(P03.00, P03.01)
5=Positive PID feedback: by single- phase
input (DI7), without direction (P10.16=5)
7=Negative PID feedback: by communication
protocols
8=Positive PID feedback: by communication
protocols
0
08 01
Proportional gain (P)
0.0–1000.0 (When P08.23 bit 1=0)
0.00–100.00 (When P08.23 bit 1=1)
1.00
08 02
Integral time (I)
0.00–100.00 sec.
1.00
08 03
Differential time (D)
0.00–1.00 sec.
0.00
08 04
Upper limit of integral control
0.0–100.0%
100.0
08 05
PID output command limit (positive
limit)
0.0–110.0%
100.0
08 06
PID feedback value by communication
protocol
-200.00–200.00%
0.00
08 07
PID delay time
0.0–2.5 sec.
0.0
08 08
Feedback signal detection time
0.0–3600.0 sec.
0.0
08 09
Feedback signal fault treatment
0=Warn and continue operation
1=Fault and ramp to stop
2=Fault and coast to stop
3=Warn and operate at last frequency
0
08 65
PID target value source
0=Frequency command (P00.20, P00.30)
1=P08.66 setting
2=RS-485 communication input
3=External analog input (refer to P03.00,
P03.01)
6=Communication card
7=Digital keypad potentiometer dial (GS20
only)
0
13 00
Application Selection
00=Disabled
01=User parameter
02=Compressor
03=Fan
04=Pump
05=Conveyor
06=Machine tool
07=Packing
08=Textiles
0
Multi-function Input Selections
0=No function
1=Multi-step speed command 1 /
multi-step position command 1
2=Multi-step speed command 2 /
multi-step position command 2
3=Multi-step speed command 3 /
multi-step position command 3
4=Multi-step speed command 4 /
multi-step position command 4
5=Reset
6=JOG [by external control or GS4-KPD
(optional)]
7=Acceleration / deceleration speed
inhibit
8=1st and 2nd acceleration /
deceleration time selection
9=3rd and 4th acceleration /
deceleration time selection
10=External Fault (EF) Input (P07.20)
11=Base Block (B.B.) input from external
source
12=Output stop
13=Cancel the setting of auto-
acceleration / auto-deceleration
time
15=Rotating speed command from AI1
16=Rotating speed command from AI2
18=Force to stop (P07.20)
19=Digital up command
20=Digital down command
21=PID function disabled
22=Clear the counter
23=Input the counter value (DI6)
24=FWD JOG command
25=REV JOG command
26=TQC / Field Oriented Control (FOC)
mode selection
27=ASR1 / ASR2 selection
28=Emergency stop (EF1)
29=Signal confirmation for
Y-connection
30=Signal confirmation for
δ
-connection
31=High torque bias (P11.30)
32=Middle torque bias (P11.31)
33=Low torque bias (P11.32)
38=Disable writing EEPROM function
39=Torque command direction
40=Force coasting to stop
41=HAND switch
42=AUTO switch
48=Mechanical gear ratio switch
49=Enable drive
50=Slave dEb action to execute
51=Selection for PLC mode bit 0
52=Selection for PLC mode bit 1
56=Local / Remote selection
58=Enable fire mode (with RUN
command)
59=Enable fire mode (without RUN
command)
70=Force auxiliary frequency return to 0
71=Disable PID function, force PID
output return to 0
72=Disable PID function, retain the
output value before disabled
73=Force PID integral gain return to 0,
disable integral
74=Reverse PID feedback
81=Simple positioning zero point
position signal input
82=OOB loading balance detection
83=Multi-motor (IM) selection bit 0
84=Multi-motor (IM) selection bit 1
Multi-function Output Selections
0=No function
1=Indication during RUN
2=Operation speed reached
3=Desired frequency reached 1 (P02.22)
4=Desired frequency reached 2 (P02.24)
5=Zero speed (Frequency command)
6=Zero speed including STOP
(Frequency command)
7=Over-torque 1 (P06.06–06.08)
8=Over-torque 2 (P06.09–06.11)
9=Drive is ready
10=Low voltage warning (Lv) (P06.00)
11=Malfunction indication
13=Overheat warning (P06.15)
14=Software brake signal indicator
(P07.00)
15=PID feedback error (P08.13, P08.14)
16=Slip error (oSL)
17=Count value reached, does not
return to 0 (P02.20)
18=Count value reached, return to 0
(P02.19)
19=External interrupt B.B. input (Base
Block)
20=Warning output
21=Over-voltage
22=Over-current stall prevention
23=Over-voltage stall prevention
24=Operation mode
25=Forward command
26=Reverse command
29=Output when frequency ≥ P02.34
30=Output when frequency < P02.34
31=Y-connection for the motor coil
32=
δ
-connection for the motor coil
33=Zero speed (actual output
frequency)
34=Zero speed including STOP (actual
output frequency)
35=Error output selection 1 (P06.23)
36=Error output selection 2 (P06.24)
37=Error output selection 3 (P06.25)
38=Error output selection 4 (P06.26)
40=Speed reached (including STOP)
42=Crane function
43=Motor speed detection
44=Low current output (use with
P06.71–06.73)
45=UVW output electromagnetic valve
switch
46=Master dEb output
51=Analog output control for RS-485
interface
52=Output control for communication
cards
53=Fire mode indication
66=SO output logic A
67=Analog input level reached
68=SO output logic B
73=Over-torque 3
74=Over-torque 4
75=Forward RUN status
76=Reverse RUN status
AI Multi-function Input Selections
0=No function
1=Frequency command
2=Torque command (torque limit under
speed mode)
3=Torque compensation command
4=PID target value
5=PID feedback signal
6=Thermistor (PTC) input value
7=Positive torque limit
8=Negative torque limit
9=Regenerative torque limit
10=Positive / negative torque limit
11=PT100 thermistor input value
12=Auxiliary frequency input
13=PID compensation value
AO1 Multi-function Output Selections
0=Output frequency (Hz)
1=Frequency command (Hz)
2=Motor speed (Hz)
3=Output current (rms)
4=Output voltage
5=DC bus voltage
6=Power factor
7=Power
8=Output torque
9=AI1
10=AI2
12=Iq current command
13=Iq feedback value
14=Id current command
15=Id feedback value
16=Vq-axis voltage command
17=Vd-axis voltage command
18=Torque command
19=PG2 (DI7) frequency command
21=RS-485 analog output
22=Communication card analog output
23=Constant voltage output
OPTIONAL CONFIGURATION SETTING:
GS2 mode is an
optional
setting for users who want the drive to operate in the legacy GS2 parameter
configuration. This mode changes the entire parameter structure of the drive. See the GS20 User Manual
Appendix G for more details.
Entering and Exiting “GS2” Mode
GS20 drives that have an equivalent GS2 model (same power and HP rating) have the option of being operated
in “GS2 Mode”. This allows you to use the new drive in exactly the same role as an older GS2 drive that needs
to be replaced, or in conjuction with existing GS2 drives.
Note that all drives will come factory standard with GS20 mode as the default setting.
Enter GS2 Mode
Note: To enter GS2 mode, parameters cannot be locked or set to read only, and the PLC must be disabled. If
any of these requirements are not met, you will be unable to set 00.02 to 20.
1) Set parameter 00.02=2, to reset to GS2 mode (step 1 of 2) and press ENTER.
2) Set parameter 00.02=20 to reset to GS2 mode (step 2 of 2) and press ENTER.
3) Reboot the drive by cycling power.
4) Configure GS2 parameters using the GS2 series User Manual.
Exit GS2 Mode
1) Set parameter 09.08=20 to reset to GS20 mode (parameters will reset). Press ENTER.
2) Reboot the drive by cycling power.
3) Configure GS20 parameters per the tables above and in the GS20 User Manual.
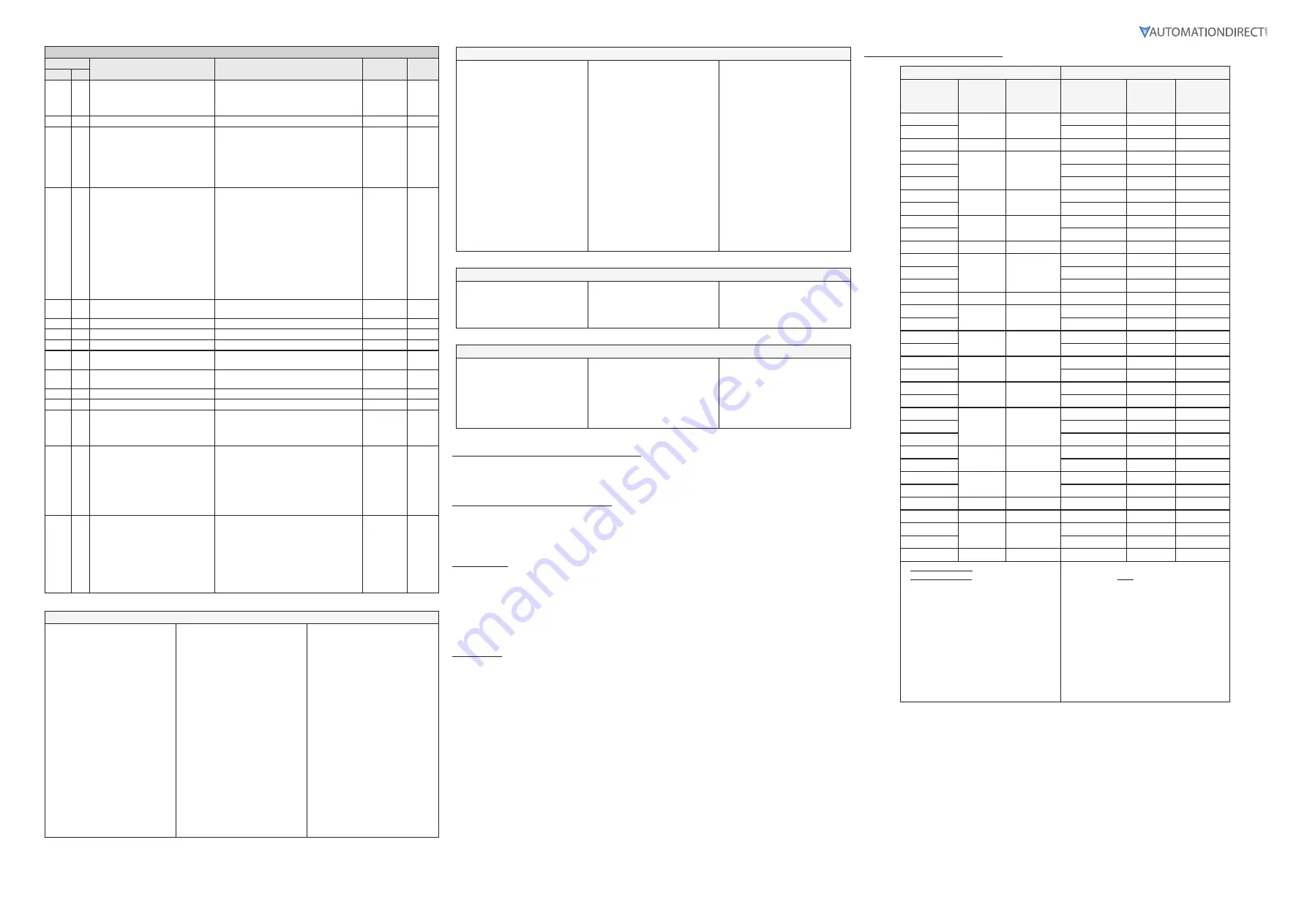
Cooling and Heat Dissipation
Airflow Rate for Cooling
Power Dissipation (Watts)
Model
Number
Flow Rate
(cfm)
Flow Rate
(m
3
/hr)
Loss External
(Heat sink)
Internal
Total
GS21-10P2
0.0
0.0
8.0
10.0
18.0
GS21-10P5
14.2
13.1
27.3
GS21-11P0
16.0
27.2
29.1
23.9
53.0
GS21-20P2
0.0
0.0
8.0
10.3
18.3
GS21-20P5
16.3
14.5
30.8
GS21-21P0
29.1
20.1
49.2
GS21-22P0
16.0
27.2
29.1
23.9
53.0
GS21-23P0
70.0
35
105
GS23-2010
53.7
91.2
244.5
79.6
324.1
GS23-2015
374.2
86.2
460.4
GS23-2020
67.9
115.2
492.0
198.2
690.2
GS23-20P2
0.0
0.0
8.6
10.0
18.6
GS23-20P5
16.5
12.6
29.1
GS23-21P0
31.0
13.2
44.2
GS23-22P0
10.0
16.99
50.1
24.2
74.3
GS23-23P0
16.0
27.2
76.0
30.7
106.7
GS23-25P0
108.2
40.1
148.3
GS23-27P5
23.4
39.7
192.8
53.3
246.1
GS23-4010
164.7
55.8
220.5
GS23-4015
53.7
91.2
234.5
69.8
304.3
GS23-4020
319.8
74.3
394.1
GS23-4025
67.9
115.2
423.5
181.6
605.1
GS23-4030
501.1
200.3
701.4
GS23-40P5
10.0
16.99
17.6
11.1
28.7
GS23-41P0
30.5
17.8
48.3
GS23-42P0
45.9
21.7
67.6
GS23-43P0
16.0
27.2
60.6
22.8
83.4
GS23-45P0
93.1
42
135.1
GS23-47P5
23.4
39.7
132.8
39.5
172.3
GS23-5010
108.4
51
159.4
GS23-51P0
0.0
0.0
23.5
12.5
36
GS23-52P0
10.0
16.99
38.1
19
57.1
GS23-53P0
16.0
27.2
56.6
22.2
68.8
GS23-55P0
76.1
30
106.1
GS23-57P5
23.4
39.7
93.9
37
130.9
• External Flow Rate is across the heat sink.
• Internal Flow Rate is through the chassis.
• Published flow rates are the result of active
cooling using fans, factory installed in the
drive.
• Unpublished flow rates ( - ) are the result
of passive cooling in drives without factory
installed fans.
• The required airflow shown in the chart
is for installing a single GS20 drive in a
confined space.
• When installing multiple GS20 drives,
the required air volume would be the
required air volume for a single GS20 drive
multiplied by the number of GS20 drives.
• When calculating power dissipation (Watt
Loss), use the Total value. Heat dissipation
shown in the chart is for installing a single
GS20 drive in a confined space.
• When installing multiple drives, the volume
of heat/power dissipation should be the
heat/power dissipated by a single GS20 drive
multiplied by the number of GS20 drives.
• Heat dissipation for each model is calculated
by rated voltage, current and default carrier
frequency.







































































