


























www.baldormotion.com
Control System B-1
MN1901
B.1 Introduction
The MintDrive
II
can be configured for four basic control modes to suit the particular
application. The choice of mode is defined using the Commissioning Wizard or the Mint
keyword
CONFIG
. See the Mint help file for details. The four control modes are shown in
Figures 54 to 57.
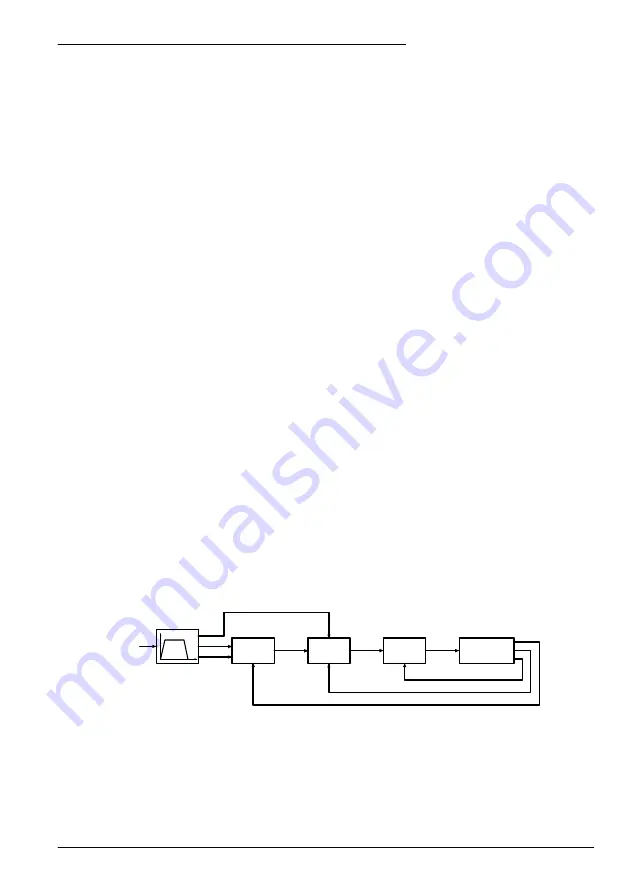
B.1.1 Positioning system with speed controller
Setting
CONFIG
to
_cfSERVO
configures the MintDrive
II
as a full positioning system, as
shown in Figure 54. Here, a position reference obtained from a specified source (e.g. a Mint
program, the Mint WorkBench Command window, the auxiliary encoder, or Fieldbus) provides
targets for a position profiler. The profiler generates a position demand signal that smoothly
changes between successive targets. The profile also generates corresponding speed and
acceleration demand signals.
The position and speed demand signals are fed into a position controller and used, together
with the position measured from the feedback device, to generate a suitable speed demand
signal. If the position controller is tuned correctly, the measured position will accurately track
the position demand. The speed demand signal from the position controller is fed into a speed
controller and used, together with the speed measured from the feedback device, to generate
a torque demand signal. Again, if the speed controller is tuned correctly, the measured speed
will accurately track the speed demand. To improve the tracking performance of the speed
controller, the profiler acceleration demand is fed in at this point.
Finally, the torque demand signal is fed into a torque controller. This demand torque is used to
determine the appropriate amount of current to apply to the windings of the motor. This
demand current is compared with the actual winding current measured from sensors, and a
suitable pulse width modulation (PWM) signal is generated. This PWM signal is fed to the
power electronics in the drive.
Position
controller
Speed
controller
Torque
controller
Power stage
+ motor
Speed
demand
Torque
demand
PWM
Position
Speed
Accn
Position
profiler
Position
reference
Measured current
Measured speed
Measured position
Figure 54 - Control structure in Servo (
_cfServo
) configuration
B
Control System
B
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































