B&G H5000 Pilot, Installation Manual
The B&G H5000 Pilot is an advanced autopilot system designed for sailing vessels. With its Quick Reference Manual, users can easily learn to operate the Pilot effortlessly. This comprehensive manual is available for free download on 88.208.23.73:8080, providing users with all the instructions needed to maximize their sailing experience.
Share
Download

















Reviews:
No comments
Related manuals for H5000 Pilot

2
Brand: Navman Pages: 17

E Series
Brand: zipwake Pages: 2
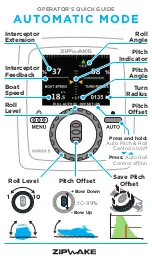
E Series
Brand: zipwake Pages: 2

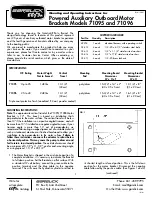
12008
Brand: Taylor Made Pages: 2

8
Brand: Walker Bay Pages: 8

SC-1
Brand: Velocitek Pages: 81

H5000 Pilot
Brand: B&G Pages: 2

74002
Brand: Garelick Pages: 2

19250
Brand: Garelick Pages: 2
71095
Brand: Garelick Pages: 4

418
Brand: Harken Pages: 2

598
Brand: Harken Pages: 4

BAHIA
Brand: Laser Pages: 2

BIMINI
Brand: Access Pages: 7
A97
Brand: Ultraflex Pages: 48
A98
Brand: Ultraflex Pages: 52

YDEG-04
Brand: Yacht Devices Pages: 68
WeedRoller PRO
Brand: Crary Pages: 56





















































