





























X20 system modules • Motor controllers • X20SM1436
2056
X20 system User's Manual 3.10
Position setting
The position setpoint can be defined in two different ways:
Type of setpoint definition
Description
Single setpoint
Once the position setpoint is reached, the
Target reached
bit in the Status word register is set. Then a new position setpoint is
defined. The drive stops at each position setpoint before starting the movement to the next position setpoint.
Set of setpoints
Once a setpoint has been reached, the movement to the next setpoint is started immediately without stopping the drive. It is
therefore not possible to initiate a new positioning movement by transferring a new position setpoint during an active positioning
movement.
Table 717: Types of position setpoint definition
The two modes "Single setpoint" and "Set of setpoints" are controlled by the timing of the bits
New setpoint
and
Change set immediately
in the
and
Setpoint acknowledge
in the
register.
These bits can be used to create a Request-Response mechanism. This makes it possible to specify a position
setpoint while previous setpoint is still being processed.
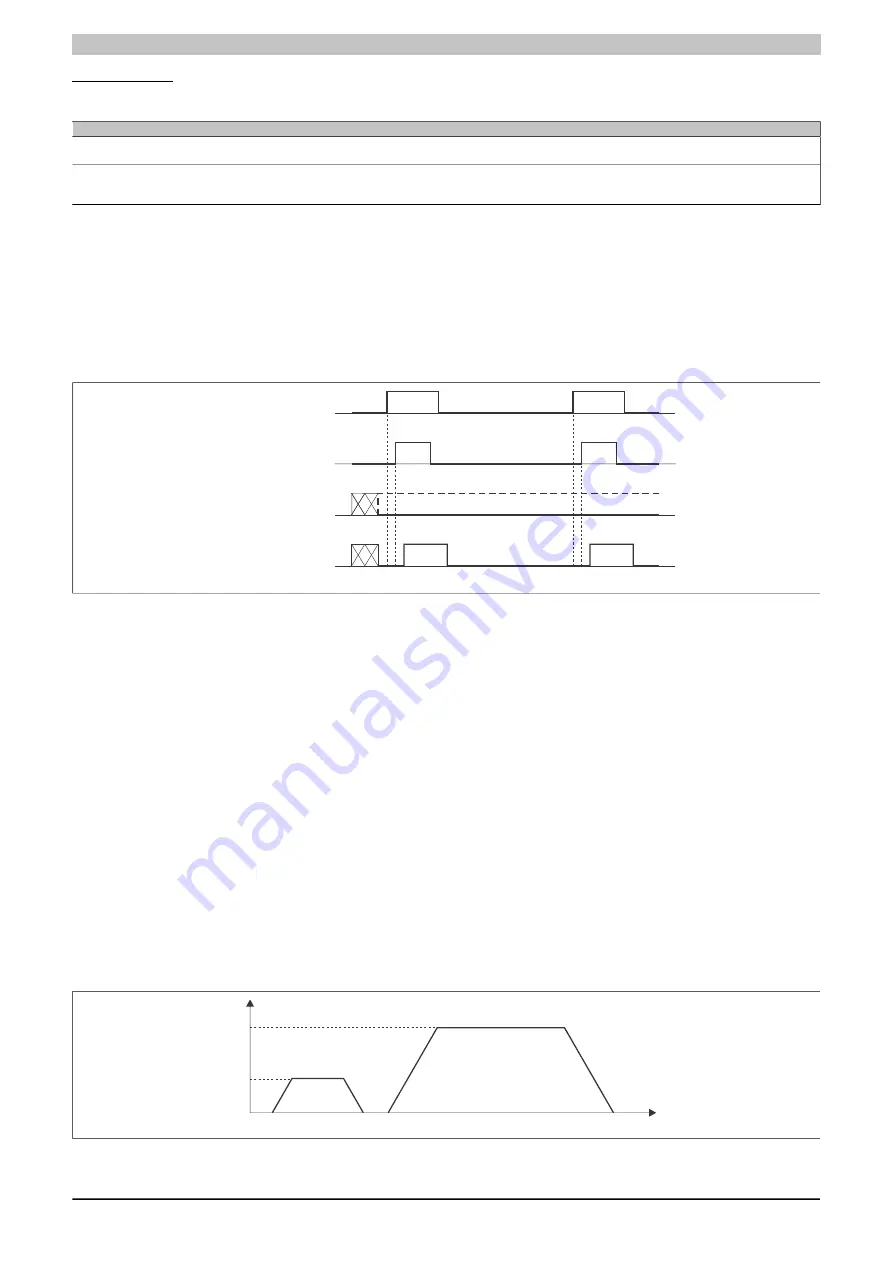
Transferring the position setpoint
New setpoint
Setpoint acknowledge
Change set immediately
①
②
④
③
⑥
Data (position setpoint)
Ⓐ
Ⓑ
⑤
Figure 636: Principle for applying the setpoint
Transferring a new setpoint:
1 When the
Setpoint acknowledge
bit in the Extended status word register is 0, the module will accept a
new position setpoint.
2 The new position setpoint is specified in the
.
3 A rising edge of the
New setpoint
bit in the Extended control word register signalizes that the new position
register is valid and can be used for the next positioning movement.
4 Once the module has received and saved the new position setpoint, the
Setpoint acknowledge
bit in the
Status word
register is set to 1.
5 Now the controller can reset the
New setpoint
bit to 0.
6 Then the module resets the
Setpoint acknowledge
bit to 0 to signal when a new position setpoint is ac-
cepted.
"Single setpoint" mode
When the
Change set immediately
bit is set to 0
(Ⓐ
in figure "Principle for applying the setpoint"), then the module
is operating in
Single setpoint
mode. This mechanism results in a speed of 0 when the motor reaches position
setpoint x
1
at time t
1
. After the controller has been notified that the setpoint has been reached, the next setpoint
x
2
will be processed at time t
2
and reached at t
3
.
v
1
v
2
t
0
t
1
t
2
t
3
Figure 637: Ramp in
Single setpoint mode
Summary of Contents for X20 System
Page 2: ......







































































