




























M O T OR DRIV E ALARMS
1 3 9
8.1.2 M O T OR DRIV E AL ARMS / Speed feedback m
i
smatch to
l
erance PIN 1 7 2
Note. If th
i
s va
l
ue
i
s set too
l
o w then spur
i
ous a
l
arms may be caused by dynam
i
c
l
ags or non-
li
near effects.
Note. M
i
smatched ca
li
brat
i
on bet w een the A V F and tacho and/or encoder ca
li
brat
i
on erodes th
i
s marg
i
n.
Note. There
i
s a f
l
ag on h
i
dden PIN 7 0 3 w h
i
ch w arns of a speed m
i
smatch after the norma
l
de
l
ay t
i
me.
Th
i
s f
l
ag
i
s reset by a start or
j
og command.
8.1.3 M O T OR DRIV E AL ARMS / F
i
e
l
d
l
oss tr
i
p enab
l
e PIN 1 7 3
Th
i
s a
l
arm w
ill
norma
ll
y tr
i
gger
i
f the f
i
e
l
d current drops be
l
o w 2 0 % of rated current (5 %
i
n f
i
e
l
d w eaken
i
ng
mode). Fau
l
ty operat
i
on of the f
i
e
l
d contro
ll
er may a
l
so cause a motor f
i
e
l
d fa
il
a
l
arm. The most usua
l
cause
for the motor f
i
e
l
d a
l
arm
i
s an open c
i
rcu
i
t motor f
i
e
l
d.
If th
i
s a
l
arm occurs, the motor f
i
e
l
d connect
i
ons shou
l
d be checked and the f
i
e
l
d res
i
stance measured.
The res
i
stance of the f
i
e
l
d = datap
l
ate f
i
e
l
d vo
l
ts / datap
l
ate f
i
e
l
d current.
W A
R
N
I
NG. Fo
r
r
a
t
e
d f
i
e
l
d
c
u
rr
e
nts th
a
t
a
r
e
l
e
ss th
a
n 25% of mod
e
l
r
a
t
i
ng th
e
a
l
a
r
m th
r
e
sho
l
d m
a
y b
e
too
l
ow to t
ri
gg
e
r
. Th
e
a
l
a
r
m must b
e
t
e
st
e
d. To ov
e
r
c
om
e
th
i
s p
r
ob
l
e
m, 4
)
R
ATED F
I
E
L
D AM
P
S m
a
y b
e
s
e
t to
a
h
i
gh
e
r
l
e
v
e
l
a
nd 114
)
F
I
E
L
D
R
EFE
R
ENCE s
e
t
l
ow
e
r
. Th
i
s h
a
s th
e
e
ff
ec
t of
r
a
i
s
i
ng th
e
th
r
e
sho
l
d.
E.g. S
e
t 4
)
R
ATED F
I
E
L
D AM
P
S to tw
i
ce
moto
r
r
a
t
i
ng
a
nd 114
)
F
I
E
L
D
R
EFE
R
ENCE to 50.00%.
If the PL/X
i
s feed
i
ng a
l
oad w h
i
ch requ
i
res no f
i
e
l
d supp
l
y, for examp
l
e a permanent magnet motor, then
9 9)FIELD EN A BLE shou
l
d be d
i
sab
l
ed. Th
i
s automat
i
ca
ll
y
i
nh
i
b
i
ts the f
i
e
l
d fa
il
a
l
arm.
A
l
arm de
l
ay t
i
me: 2.0 0 secs.
8.1.4 M O T OR DRIV E AL ARMS / D
i
g
i
ta
l
OP short c
i
rcu
i
t tr
i
p enab
l
e PIN 1 7 4
A
ll
d
i
g
i
ta
l
outputs, and the 2 4 V user supp
l
y have been des
i
gned to w
i
thstand a d
i
rect short c
i
rcu
i
t to 0 V . If
th
i
s happens, an
i
nterna
l
a
l
arm
i
s ra
i
sed. The rema
i
n
i
ng d
i
g
i
ta
l
outputs are a
l
so d
i
sab
l
ed resu
l
t
i
ng
i
n a
l
o w
output. (Short c
i
rcu
i
t current
i
s approx
i
mate
l
y 3 5 0 m A for d
i
g
i
ta
l
outputs and 4 0 0 m A for + 2 4 V).
If the a
l
arm
i
s d
i
sab
l
ed and the short
i
ng fau
l
t has not
i
nterrupted the dr
i
ve runn
i
ng norma
ll
y, then the dr
i
ve
w
ill
cont
i
nue to run. Note,
i
f any d
i
g
i
ta
l
output
i
s shorted the + 2 4 V term
i
na
l
T 3 5 w
ill
rema
i
n act
i
ve w
i
th a
capab
ili
ty of 5 0m A . If the + 2 4 V output
i
s shorted then a
ll
d
i
g
i
ta
l
outputs w
ill
a
l
so go
l
o w and th
i
s a
l
arm
i
s
act
i
vated. In th
i
s case
i
f the + 2 4 V
i
s be
i
ng used to enab
l
e C ST OP or ST ART then the dr
i
ve w
ill
stop.
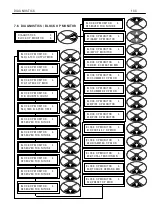
M O T OR DRIV E AL ARMS 2
1 7 2)SPEED TRIP T OL
1 7 2)SPEED TRIP T OL
5 0.0 0 %
PAR A ME TER
RA N GE
DEF A ULT
PIN
SPEED TRIP T OL
0.0 0 to 1 0 0.0 0 %
5 0.0 0 % 1 7 2
Sets the speed feedback
m
i
smatch tr
i
p to
l
erance.
M O T OR DRIV E AL ARMS 2
1 7 3)FLD LO SS TRIP EN
1 7 3)FLD LO SS TRIP EN
EN A BLED
PAR A ME TER
RA N GE
DEF A ULT
PIN
FLD LO SS TRIP EN
EN A BLED OR DIS A BLED EN A BLED
1 7 3
A
ll
o w s the f
i
e
l
d fa
il
ure a
l
arm
tr
i
p to be d
i
sab
l
ed.
R
R
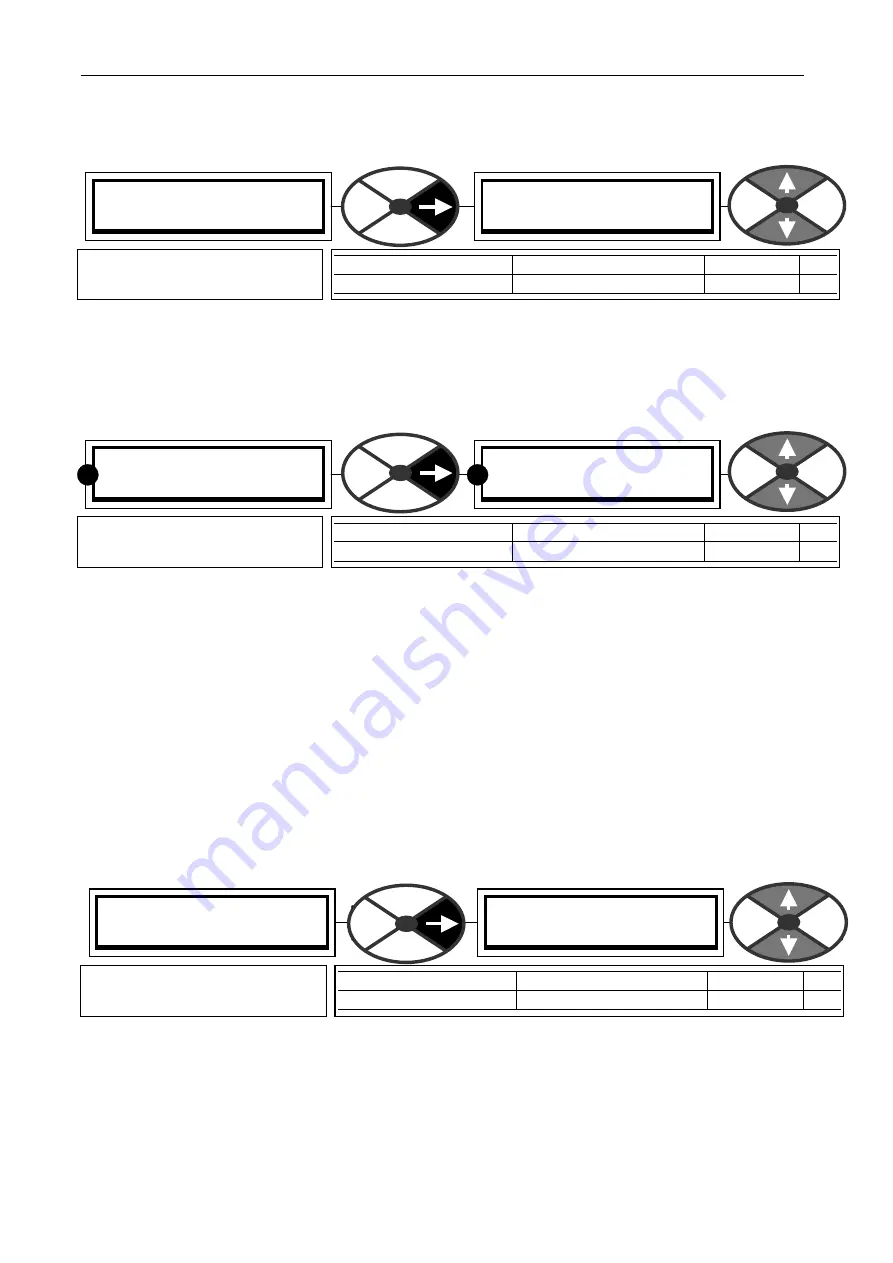
M O T OR DRIV E AL ARMS 2
1 7 4)D OP S C C T TRIP EN
1 7 4)D OP S C C T TRIP EN
DIS A BLED
PAR A ME TER
RA N GE
DEF A ULT
PIN
D OP S C C T TRIP EN
EN A BLED OR DIS A BLED DIS A BLED
1 7 4
A
ll
o w s the d
i
g
i
ta
l
output short
c
i
rcu
i
t a
l
arm tr
i
p to be enab
l
ed.
Summary of Contents for PLX
Page 2: ...2 Contents ...
Page 202: ......







































































