




























Introduct
i
on and Techn
i
ca
l
Data
2 9
Du
a
l
Cu
rr
e
nt C
l
a
mp En
a
b
l
e
D
i
g
i
t
a
l
i
nput
D
I
O4 T21
Th
i
s
i
nput a
l
ters the conf
i
gurat
i
on of the current c
l
amps. W hen the
i
nput
i
s
l
o w , A na
l
ogue
i
nput T 6 prov
i
des
a symmetr
i
c b
i
-po
l
ar current
li
m
i
t. W hen h
i
gh, ana
l
ogue
i
nput T 6
i
s the pos
i
t
i
ve current c
l
amp and ana
l
ogue
i
nput T 5
i
s the negat
i
ve current c
l
amp.
Z
e
r
o sp
ee
d
D
i
g
i
t
a
l
Output
DO
P
1 T22
The operat
i
ng
l
eve
l
of th
i
s output can be mod
i
f
i
ed by 1 1 7) ZERO IN TLK SPD % to g
i
ve the des
i
red speed
thresho
l
d of operat
i
on. A h
i
gh output + 2 4 V
i
nd
i
cates Zero speed.
Ra
mp
i
ng f
l
a
g
D
i
g
i
t
a
l
Output
DO
P
2 T23
Th
i
s goes h
i
gh w hen the Run Mode Ramp
i
s ramp
i
ng. (Used to prevent speed
l
oop
i
ntegrat
i
on dur
i
ng ramp).
D
ri
v
e
h
ea
l
thy
D
i
g
i
t
a
l
Output
DO
P
3 T24
Th
i
s output
i
s h
i
gh w hen the contro
ll
er
i
s hea
l
thy. Th
i
s means that no a
l
arms have tr
i
pped and the dr
i
ve
i
s
ready to run.
OV t
e
r
m
i
n
a
l
0V
T25
DC T
ac
hog
e
n
e
r
a
to
r
I
nput
TACH T26
Fu
ll
speed sett
i
ng range + /-1 0 V to + /-2 0 0 V . Input
i
mpedance 1 5 0 K Ohms. S
i
gna
l
range 0 V to + /-2 0 0 V .
Us
e
r
+ 10V
Re
f
e
r
e
n
ce
+ 10V T27
Us
e
r
-10V
Re
f
e
r
e
n
ce
-10V T28
+ /-1 0.0 0 V , 0.5 % , 1 0m A max. Short c
i
rcu
i
t protect
i
on to 0 V
A
r
m
a
tu
r
e
Cu
rr
e
nt Output
I
A
R
M T29
0 to + /-5 V
li
near output for 0 to + /-1 0 0 %
mod
e
l
current. Output current capab
ili
ty + /-1 0m A max. Short
c
i
rcu
i
t protect
i
on to 0 V . Programmab
l
e Un
i
-po
l
ar or B
i
-po
l
ar output mode.
Moto
r
th
e
r
m
i
sto
r
i
nput
THM T30
It
i
s good pract
i
ce to protect D C motors aga
i
nst susta
i
ned therma
l
over
l
oads by f
i
tt
i
ng temperature sens
i
t
i
ve
res
i
stors or s w
i
tches
i
n the f
i
e
l
d and
i
nterpo
l
e w
i
nd
i
ngs of the mach
i
ne. These dev
i
ces have a
l
o w res
i
stance
(typ
i
ca
ll
y 2 0 0 Ohm) up to a reference temperature 1 2 5 C. A bove th
i
s temperature, the
i
r res
i
stance r
i
ses
rap
i
d
l
y to greater than 2 0 0 0 Ohms. Motor over-temperature sensors shou
l
d be connected
i
n ser
i
es bet w een
term
i
na
l
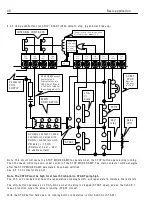
s T 3 0 and T 3 6. A motor over-temperature a
l
arm w
ill
be d
i
sp
l
ayed
i
f the externa
l
res
i
stance bet w een
T 3 0 and T 3 6 exceeds 1 8 0 0 Ohms ± 2 0 O Ohms. See 8.1.1 1.6 DRIV E TRIP MESS A GE / Therm
T
e
r
m
i
n
a
l
s T30
a
nd T36
(
0V COM
)
must b
e
li
n
ke
d
i
f
e
xt
e
r
n
a
l
ov
e
r
-t
e
mp
e
r
a
tu
r
e
s
e
nso
r
s
a
r
e
not us
e
d.
3.5.1 Run, Jog, Start, Cstop
R
un
D
i
g
i
t
a
l
i
nput
R
UN
T31
The RUN Input prov
i
des a means of e
l
ectron
i
ca
ll
y
i
nh
i
b
i
t
i
ng contro
ll
er operat
i
on.
If the RUN
i
nput
i
s
l
o w , a
ll
contro
l
l
oops w
ill
be
i
nh
i
b
i
ted and the motor stops.
RU N a
l
so contro
l
s the f
i
e
l
d. See 6.9 C H A N GE PAR A ME TERS / FIELD C O N TROL.
If the contactor
i
s be
i
ng he
l
d
i
n by a) The zero speed detector w h
il
e the motor
i
s
dece
l
erat
i
ng or b) The contactor drop out de
l
ay, then th
i
s w
ill
be term
i
nated by
RUN go
i
ng
l
o w and w
ill
resu
l
t
i
n
i
mmed
i
ate contactor drop out.
(The RUN
i
nput term
i
na
l
may a
l
so be used as a programmab
l
e d
i
g
i
ta
l
i
nput
i
f
i
t
i
s
not requ
i
red as a RUN funct
i
on)
W A
R
N
I
NG. Do not
r
e
l
y on
a
ny d
ri
v
e
fun
c
t
i
on to p
r
e
v
e
nt th
e
moto
r
f
r
om op
e
r
a
t
i
ng wh
e
n p
e
r
sonn
e
l
a
r
e
und
e
r
t
ak
i
ng m
a
i
nt
e
n
a
n
ce
, o
r
wh
e
n m
ac
h
i
n
e
gu
a
r
ds
a
r
e
op
e
n. E
l
ec
t
r
on
i
c
c
ont
r
o
l
i
s not
acce
pt
e
d by s
a
f
e
ty
c
od
e
s to b
e
th
e
so
l
e
m
ea
ns of
i
nh
i
b
i
t
i
on of th
e
c
ont
r
o
ll
e
r
. A
l
w
a
ys
i
so
l
a
t
e
th
e
pow
e
r
sou
r
ce
b
e
fo
r
e
wo
r
k
i
ng on
th
e
d
ri
v
e
o
r
th
e
moto
r
o
r
l
o
a
d.
I
f th
e
R
UN
i
nput go
e
s
l
ow
a
t
a
ny po
i
nt du
ri
ng th
e
stopp
i
ng p
r
o
ce
ss,
e
i
th
e
r
h
ea
d
i
ng fo
r
z
e
r
o sp
ee
d o
r
du
ri
ng
th
e
d
e
l
a
y p
e
ri
od, th
e
n th
e
c
ont
ac
to
r
w
ill
d
r
op out st
r
a
i
ght
a
w
a
y.
Summary of Contents for PLX
Page 2: ...2 Contents ...
Page 202: ......







































































