





























2-4
BE1-BPR Application
20
40
60
80
100
120
140
160
180
200
1.05
1.25
2
5
20
40
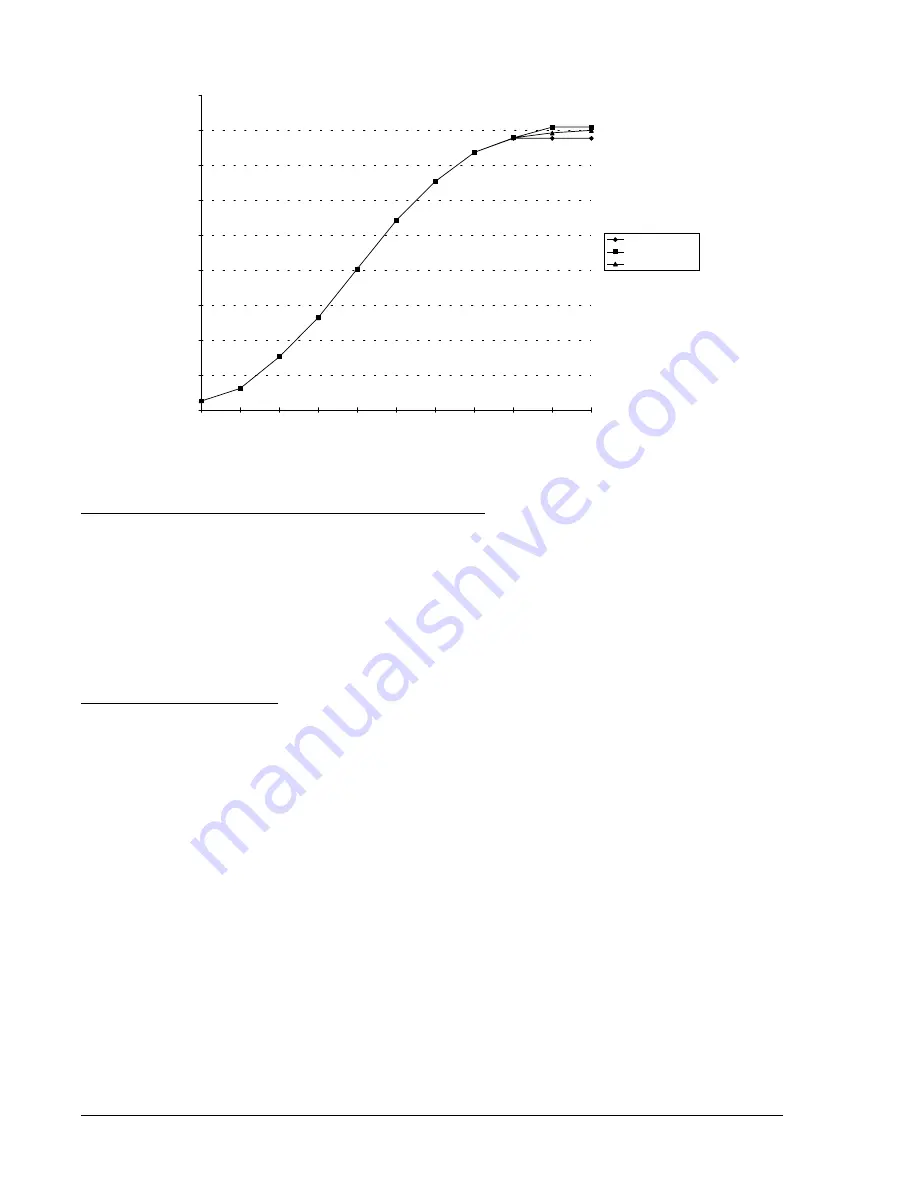
MULTIPLES OF PICKUP BEFORE DROPOUT
MAX. DROPOUT TIME (ms)
PU = 1.00A , 10 CY C
PU = 0.50A , 10 CY C
PU = 0.05A , 10 CY C
Figure 2-4. Maximum Dropout Timing With 10 Cycle MAF Fault Detector
Figure 2-4 shows maximum dropout timing versus current input levels for a 10 cycle MAF fault detector.
Three-Phase Fault Instantaneous (50) Fault Detector Type 3
This fault detector has the same characteristics as the Type 1 instantaneous fault detector with the exception
that all three phases must be picked up before the fault detector will pickup. This fault detector can be used
in BF logic schemes and is programmed by setting the fault detector logic (LF) type to PI (phase overcurrent)
and the digital filter selection to 3.
A 3-phase fault is the worst case fault for system stability and requires fast clearing times with small margins.
A 3-phase fault fault detector and a separate timer could be used in addition to the 3-phase fault detector and
timer to allow BF protection for both worst case faults and normal faults.
Application of Fault Detectors
Phase and Ground Instantaneous Fault Detectors. Normally, it is adequate to monitor the three phase
currents as they represent the current in the poles of the protected breaker. However, if the sensitivity of the
ground relays is significantly higher than the sensitivity of the phase relays, it may be desirable to apply a
ground fault detector so that you can be assured that the breaker failure protection will pickup for any fault
that is sensed by the initiating relays. Each fault detector can be independently set to monitor either the three
phase current inputs or the neutral current input. Fault detector F1 is programmed as a phase instantaneous
fault detector and fault detector F2 is programmed as a neutral instantaneous fault detector in all of the
preprogrammed logic schemes.
Three-Phase Instantaneous Fault Detectors. For system stability, a three-phase fault is the worst case. The
dynamic stability of the system is not affected as much by the other fault combinations. Since three-phase
faults are generally more rare than the other fault combinations, it may be desirable to enhance security by
treating three-phase faults differently. One of the fault detectors can be set up as a PI,3 (phase current,
Type 3) fault detector to supervise a timer set at the three phase fault, dynamic stability limit. The normal
timer supervised by the other fault detectors would then be set with a longer time delay (with more margin)
set at the two phase and ground fault (the next worst case), dynamic stability limit.
Low Level Current Detector. If the breaker fails while being opened for normal load switching or due to re-
strike after the line has been isolated, the currents flowing across the failed interrupter may be too low to
reliably detect by conventional means. The Type 2 fault detector’s moving average filter allows the BE1-BPR
to discern the low level line charging current from random noise. The application of this fault detector is
described in detail in the
Breaker Arc Detector sub-section. Fault detector F3 is programmed as a phase
MAF fault detector in all pre-programmed logic schemes.
Summary of Contents for BE1-BPR
Page 31: ...BE1 BPR Application 2 17...
Page 42: ...3 4 BE1 BPR Human Machine Interface Figure 3 4 BE1 BPR Relay Vertical Mount Front View...
Page 43: ...BE1 BPR Human Machine Interface 3 5 Figure 3 5 BE1 BPR Relay Vertical Mount Rear View...
Page 49: ...4 6 BE1 BPR Functional Description Figure 4 2 Enhanced BE1 BPR Menu Display Screens...
Page 50: ...BE1 BPR Functional Description 4 7 Figure 4 3 Standard BE1 BPR Menu Display Screens...
Page 94: ...5 4 BE1 BPR BESTlogic Figure 5 1 BESTlogic Function Blocks...
Page 121: ...BE1 BPR Installation 7 3 Figure 7 3 Overall Dimensions Vertical Mount...
Page 122: ...7 4 BE1 BPR Installation Figure 7 4 Overall Dimensions Side View Vertical Mount...
Page 123: ...BE1 BPR Installation 7 5 Figure 7 5 Panel Drilling Diagram Vertical Mount...







































































