
















Drive Technology
10 Technical data
AM3100 Version:
1.4
29
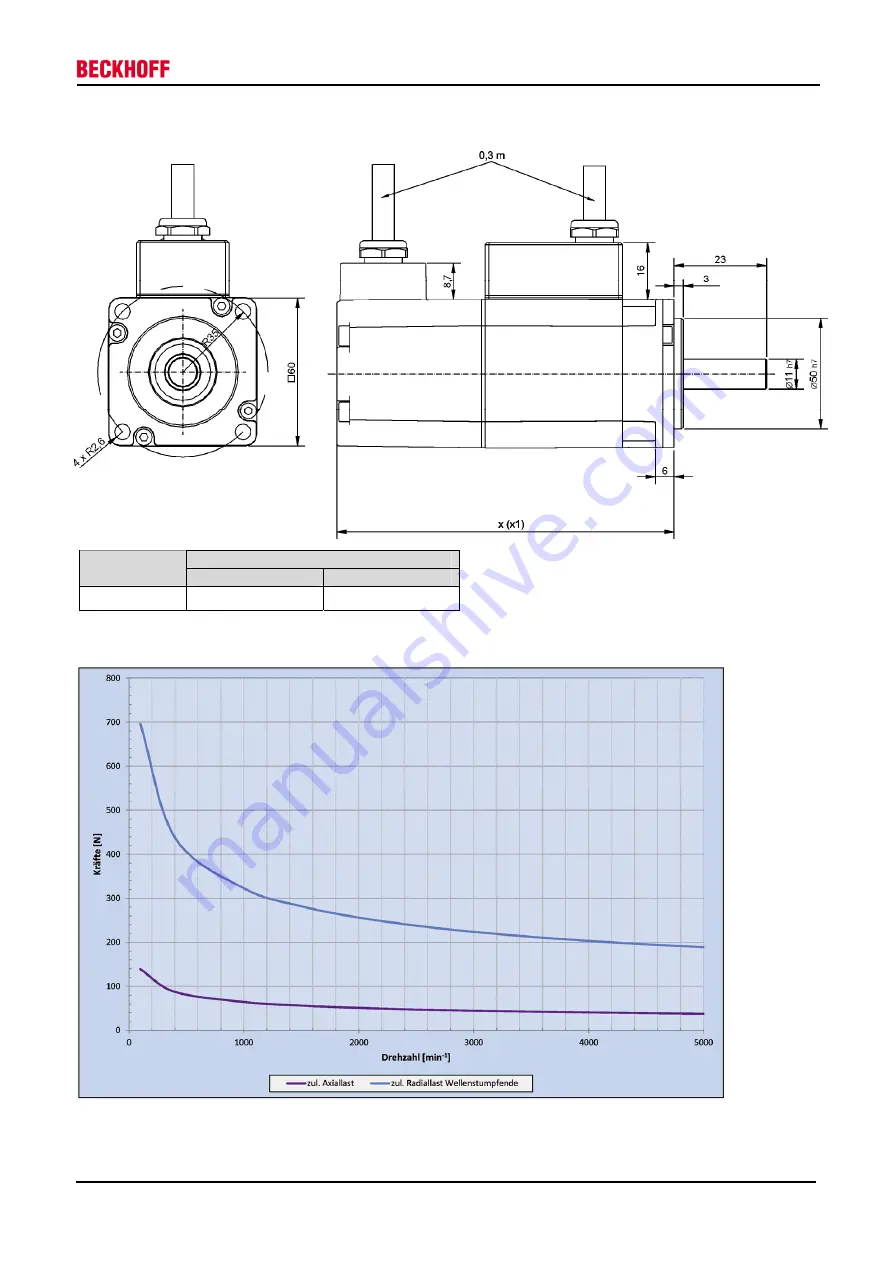
10.5 Dimensional
drawing
AM3121
10.5.1 Radial / axial forces at the shaft end
10.5.2 Characteristic torque / speed curves
Characteristic torque / speed curves see section 10.5.
Resolver
Motor type
x - without brake
x1 - with brake
AM3121 111
148







































































