




























Commissioning
EL3783
45
Version: 1.1
5.1.1.1
TwinCAT 2
Startup
TwinCAT basically uses two user interfaces: the TwinCAT System Manager for communication with the
electromechanical components and TwinCAT PLC Control for the development and compilation of a
controller. The starting point is the TwinCAT System Manager.
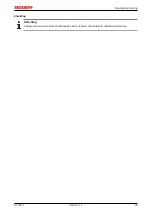
After successful installation of the TwinCAT system on the PC to be used for development, the TwinCAT 2
System Manager displays the following user interface after startup:
Fig. 35: Initial TwinCAT 2 user interface
Generally, TwinCAT can be used in local or remote mode. Once the TwinCAT system including the user
interface (standard) is installed on the respective PLC, TwinCAT can be used in local mode and thereby the
next step is "
If the intention is to address the TwinCAT runtime environment installed on a PLC as development
environment remotely from another system, the target system must be made known first. In the menu under
"Actions" → "Choose Target System...", via the symbol "
" or the "F8" key, open the following window:







































































