





























Appendix
EL6652-00x0
131
Version: 2.5
8.1.1
Device description ESI file/XML
NOTE
Attention regarding update of the ESI description/EEPROM
Some slaves have stored calibration and configuration data from the production in the EEPROM. These are
irretrievably overwritten during an update.
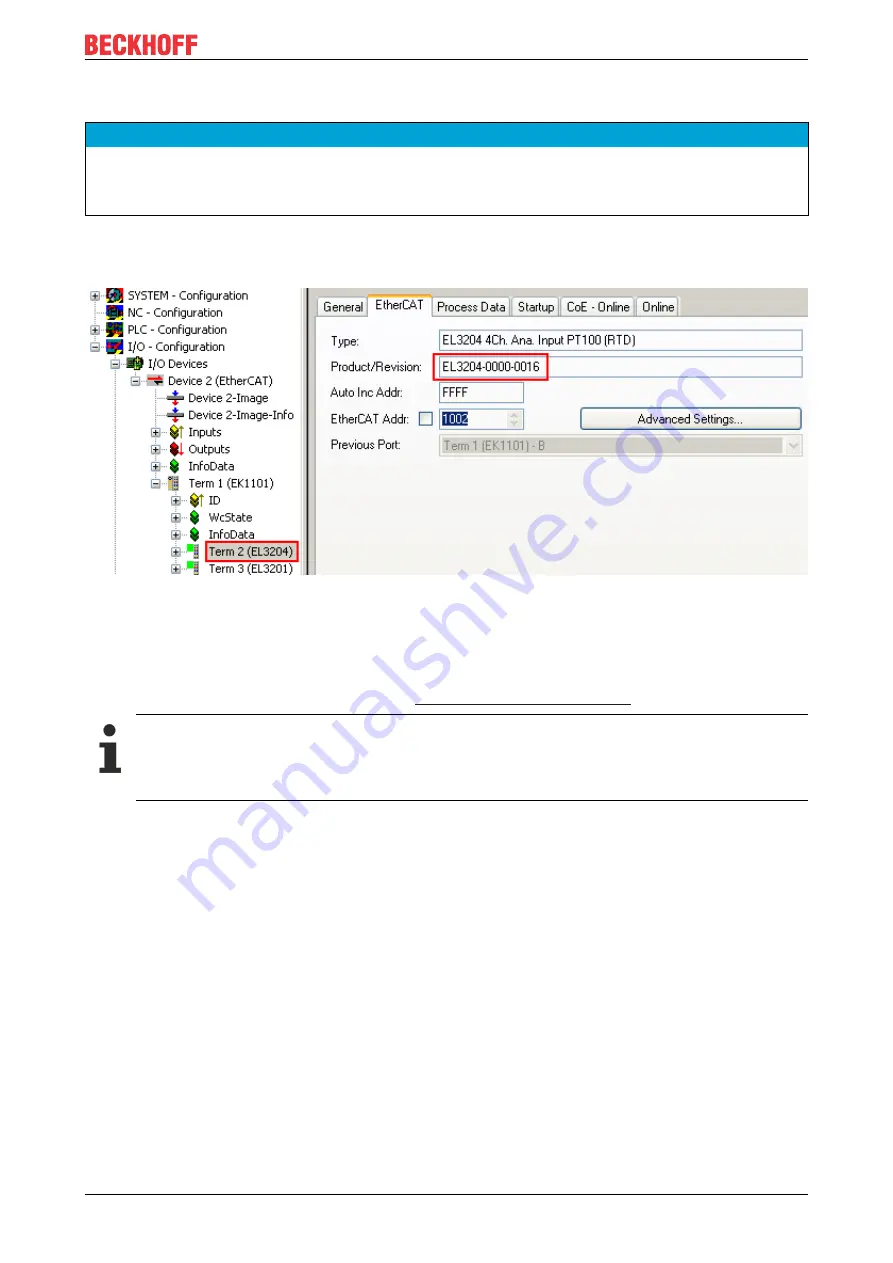
The ESI device description is stored locally on the slave and loaded on start-up. Each device description has
a unique identifier consisting of slave name (9 characters/digits) and a revision number (4 digits). Each slave
configured in the System Manager shows its identifier in the EtherCAT tab:
Fig. 150: Device identifier consisting of name EL3204-0000 and revision -0016
The configured identifier must be compatible with the actual device description used as hardware, i.e. the
description which the slave has loaded on start-up (in this case EL3204). Normally the configured revision
must be the same or lower than that actually present in the terminal network.
For further information on this, please refer to the
.
Update of XML/ESI description
The device revision is closely linked to the firmware and hardware used. Incompatible combinations
lead to malfunctions or even final shutdown of the device. Corresponding updates should only be
carried out in consultation with Beckhoff support.
Display of ESI slave identifier
The simplest way to ascertain compliance of configured and actual device description is to scan the
EtherCAT boxes in TwinCAT mode Config/FreeRun:







































































