





























Commissioning
EL70x1
160
Version: 4.4
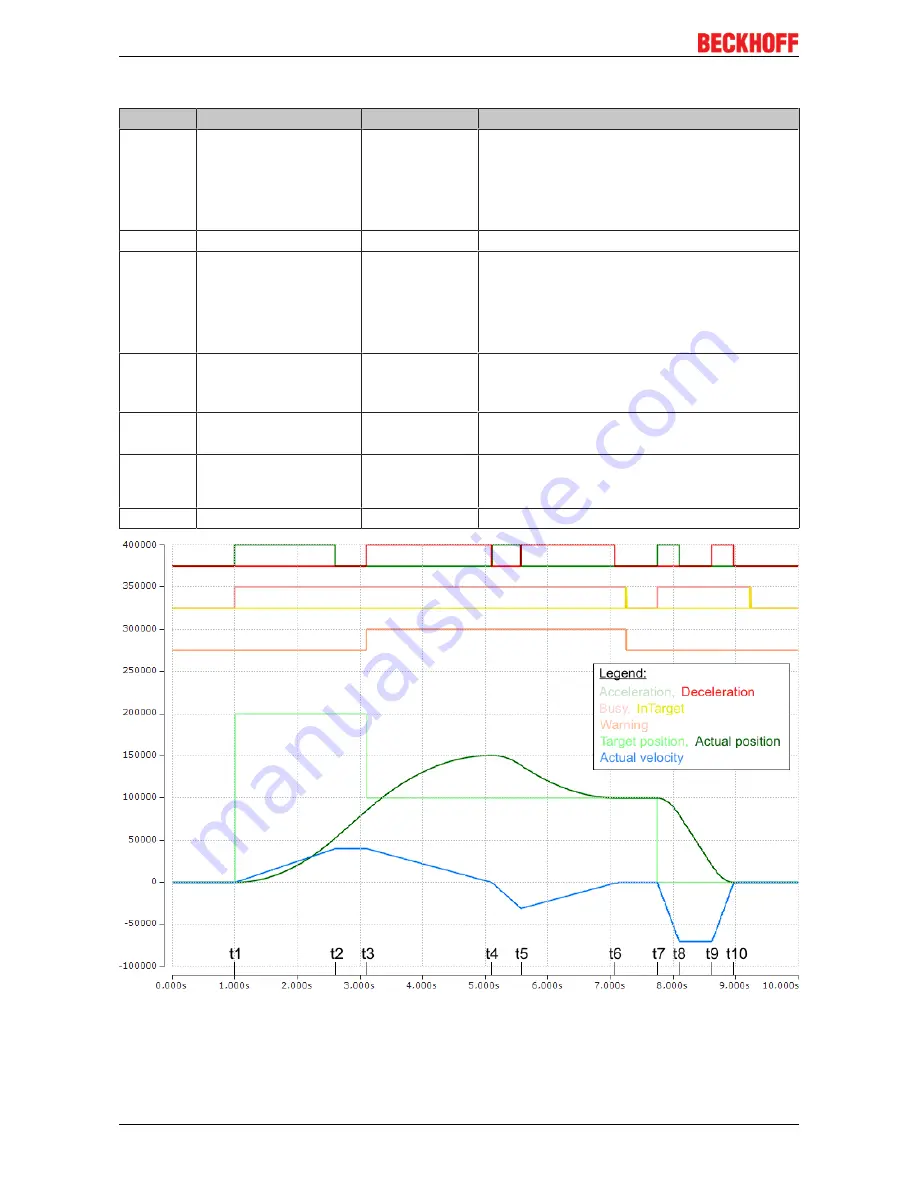
With overrun of the target position
Time
POS Outputs
POS Inputs
Description
t1:
Execute = 1
Target position = 200000
Velocity = 5000
Start type = 0x0001
Acceleration = 3000
Deceleration = 5000
Busy = 1
Accelerate = 1
• Specification of the 1
st
parameter
• Start of the 1
st
acceleration phase
t2:
Accelerate = 0
• End of the 1
st
acceleration phase
t3:
Target position = 100000
Velocity = 1500
Start type = 0x1001
Acceleration = 1000
Deceleration = 2000
Warning = 1
Decelerate = 1
• Change of the parameters
• Activation by new start types
• Warning of overrunning the target position
• Start of the 1
st
deceleration phase
t4:
Accelerate = 1
Decelerate = 0
• End of the 1
st
deceleration phase
• Start of the 2
nd
acceleration phase in the
opposite direction
t5:
Accelerate = 0
Decelerate = 1
• End of the 2
nd
acceleration phase
• Start of the 2
nd
deceleration phase
t6:
Execute = 0
Busy = 0
In-Target = 1
Decelerate = 0
• End of the 2
nd
deceleration phase
• Motor is at the new target position
t7 - t10:
• Absolute travel back to the start position 0
Fig. 184: Scope recording with overrunning of the final target position
The axis scaling refers only to the positions, not to the speed or the status bits.
Summary of Contents for EL7031
Page 1: ...Documentation EL70x1 Stepper Motor Terminals 4 4 2017 08 18 Version Date...
Page 2: ......
Page 6: ...Table of contents EL70x1 6 Version 4 4...
Page 48: ...Mounting and wiring EL70x1 48 Version 4 4 Fig 32 Other installation positions example 2...
Page 96: ...Commissioning EL70x1 96 Version 4 4 Fig 90 Incorrect driver settings for the Ethernet port...
Page 179: ...Commissioning EL70x1 179 Version 4 4 Index 7020 POS Outputs Ch 1...
Page 203: ...Commissioning EL70x1 203 Version 4 4 Index 7020 POS Outputs Ch 1...







































































