


























Product overview
KL2532/KS2532, KL2552/KS2552
12
Version: 3.2.0
2.2
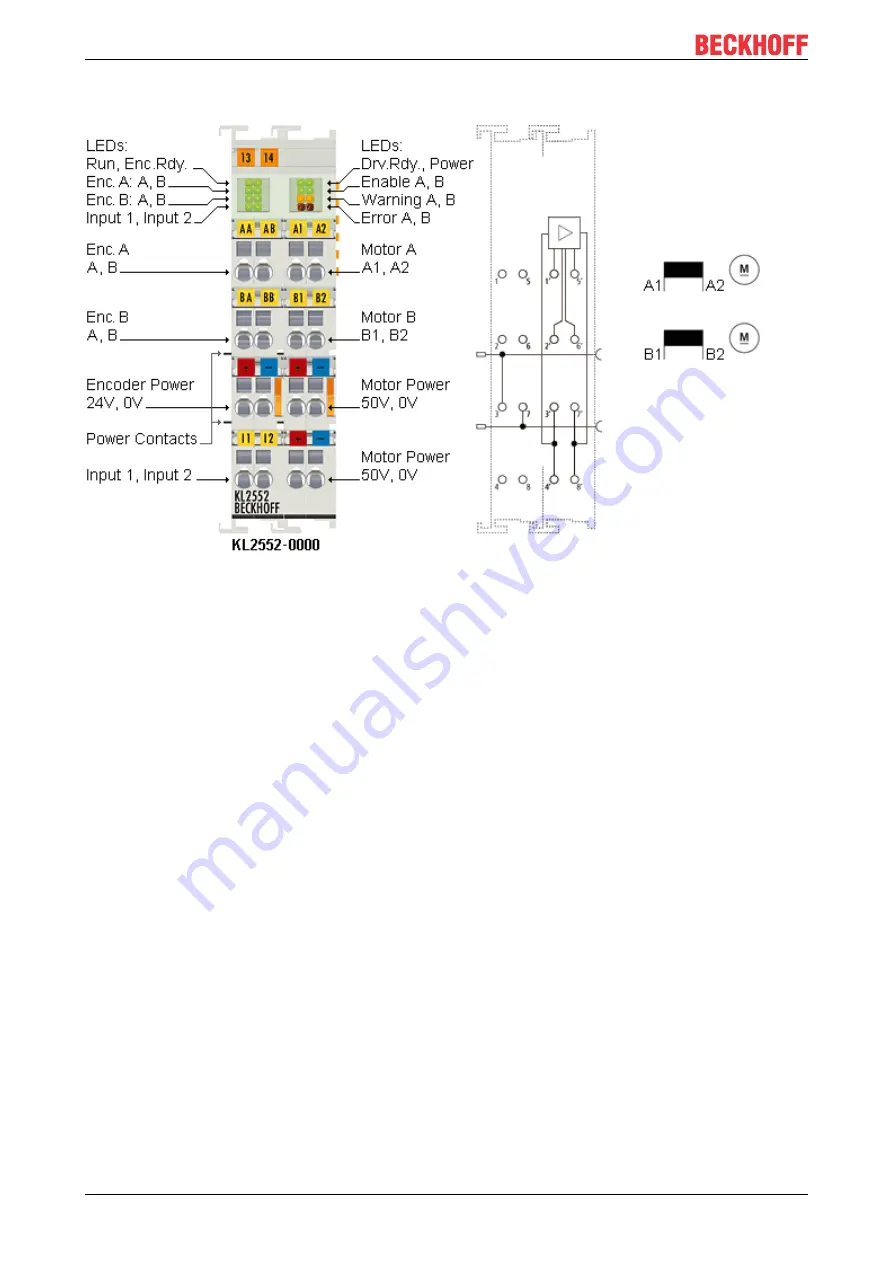
KL2552 - Introduction
Fig. 3: KL2552
The two-channel KL2552/KS2552 Bus Terminal enables direct operation of two DC motors. The set speed is
specified by the automation device with a resolution of 16 bit.
The output stage is protected against overload and short-circuit and is electrically isolated from the K-bus. A
servo axis can easily be realized by connecting an incremental encoder.
Typical motor parameters can be set in order to avoid critical conditions of the DC motor. The load can be
protected by limiting the maximum speed and torque values.
Both channels indicate their signal state through LEDs, which enable quick on-site diagnosis.
The Bus Terminal is available in the KL2552 version for standard wiring and the KS2552 for permanent
wiring.







































































