





























Access from the user program
KL304x, KL305x
30
Version: 4.0
• KL3041 and KL3051: 2 bytes of input data
• KL3042 and KL3052: 4 bytes of input data
• KL3044 and KL3054: 8 bytes of input data
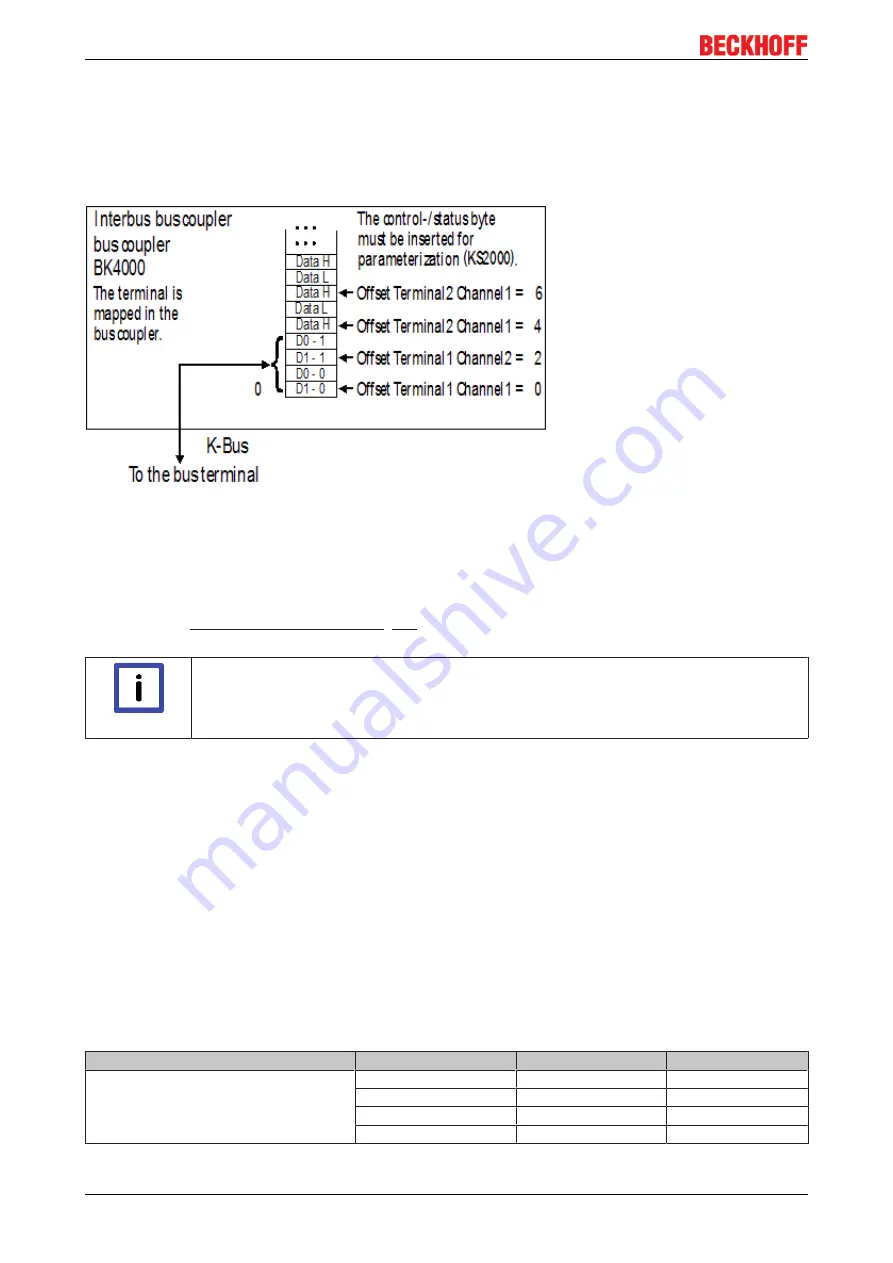
Parameterization via the fieldbus is not possible. If the control and status byte is to be used, the KS2000
configuration software is required.
Fig. 19: Mapping in the Interbus coupler - example for KL3042 and KL3052
Other Bus Couplers and further information
Further information about the mapping configuration of Bus Couplers can be found in the Appendix of the
respective Bus Coupler manual under
Master configuration
.
contains an overview of possible mapping
configurations, depending on the configurable parameters.
Note
Parameterization with KS2000
The KS2000 configuration software can be used for parameterizations via the serial inter-
face of the Bus Coupler, independent of the fieldbus system.
5.2
Mapping in the Bus Coupler
As already described in the
Terminal Configuration
section, each Bus Terminal is mapped in the Bus
Coupler. This mapping is usually done with the default setting in the Bus Coupler / Bus Terminal. The
KS2000 configuration software or a master configuration software (e.g. ComProfibus or TwinCAT System
Manager) can be used to change this default setting.
If the terminals are fully evaluated, they occupy memory space in the input and output process image.
The following tables provide information about how the terminals map themselves in the Bus Coupler,
depending on the parameters set.
5.2.1
KL3041 and KL3051
Default mapping for: CANopen, CANCAL, DeviceNet, ControlNet, Modbus, RS232 and RS485 coupler
Conditions
Word offset
High byte
Low byte
Complete evaluation: no
Motorola format: no
Word alignment: any
0
Ch1 D1
Ch1 D0
1
-
-
2
-
-
3
-
-
Summary of Contents for KL304 Series
Page 2: ......







































































