





























User Guide Revision 1.12
43
8.2.3.
PID Operating Mode Selection
For default operation the drive response to an increase in feedback signal is to decrease motor speed and vice versa to adjust the feedback
signal back to the set-point. This is referred to as ‘Direct Mode’ PID control. For example when pressure increases in a pumping system and the
feedback signal increases then the drive response is to slow the pump to reduce the pressure. This mode of operation is the default drive
behaviour and can be selected by setting P3-04=0 (User PID operating mode = Direct Mode).
The alternative operating mode is when an increase in feedback signal requires an increase in motor speed. This is referred to as ‘Inverse
mode’ PID control. For example on a condenser fan control where the feedback signal increases with the load on the condenser increases and
the fan is reduced to operate at a higher speed. This mode of operation can be selected by setting P3-04=1 (User PID operating mode = Inverse
mode).
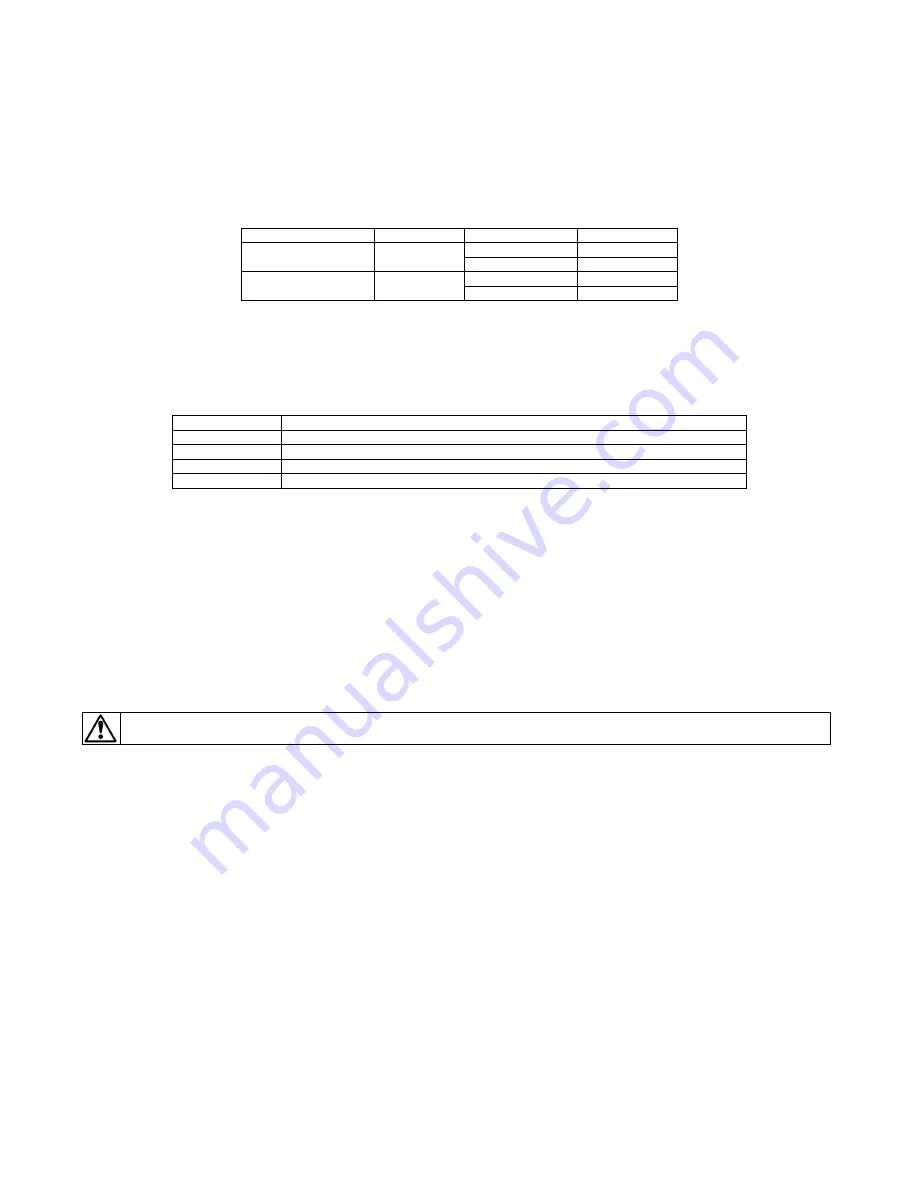
PID operating mode selection is summarised in the following table.
Parameter P3-04 Setting
Mode Selected
Feedback Behaviour
Motor Behaviour
0
Direct Mode
Signal Increases
Speed decreases
Signal decreases
Speed increases
1
Inverse Mode
Signal Increases
Speed increases
Signal decreases
Speed decreases
8.2.4.
PID Controller Output Limits
The output from the PID controller can be limited by settings within the drive not associated with the maximum and minimum speed limits set
in drive parameters P1-01 and P1-02. This means that different maximum and minimum values can be applied when the drive switches from
PID control to a preset speed (via digital input) or variable limits can be applied. Parameter P3-09 – PID Output Limit Control sets the method
used for determining the PID output limits. The following options are available.
Parameter P3-09
Description
0
Digital preset limit value (P3-07 and P3-08) will be used to limit PID controller output
1
Analog input 1 (terminal 6) will be used as the maximum output limit
2
Analog input 1 (terminal 6) will be used as the minimum output limit
3
Analog input 1 (terminal 6) will be used as an offset value and added to the PID controller output
The basic PID block diagram shown in section 8.1 shows the limits applied when P3-09 is set to 0. When other values are set for P3-09 the
limits for the PID output are defined by the methods listed in the table above.
When P3-09=0 (default) the limits are set digitally by parameters P3-07 and P3-08 and limits for the PID controller are calculated as follows.
Upper Limit = P3-07 * P1-01: (A value of 100% limits the maximum speed of the PID controller to the maximum speed limit defined in P1-01).
Lower Limit = P3-08 * P1-01
8.2.5.
PID Controller Ramp Rates
The drive standard ramp rates, as defined by P1-03 and P1-04 are normally active whilst the drive operates in PID mode. P3-11 (Maximum PID
error to enable ramps) can be set to define a threshold PID error level, whereby ramps are enabled or disabled based on the magnitude of the
PID error. If the difference between the set-point and feedback values is less than the threshold set in P3-11 then the internal ramp times of
the drive are disabled. Where a greater PID error exists, the ramp times are enabled. This allows the rate of change of motor speed on large
PID errors to be limited, whilst smaller errors are reacted to quickly. Setting P3-11 to 0 means that the drive ramps are always enabled.
Caution: Care must be taken in adjusting P3-11. Disabling the ramps may cause the motor to react dramatically to larger errors in
the PID control and tuning of the PID controller might be adversely effected.
8.2.6.
PID Controller Gains values and Tuning
As with any PID controller, the response and behaviour of the system is controlled by the Proportional Gain (P3-01), the Integral Time Constant
(P3-02) and the Differential Time Constant (P3-03). Correct setting of these parameters is essential for stable and reliable system operation.
There are many methods and text books available explaining how these terms work and how they can be tuned, and so only a brief summary is
given below.
P3-01 Proportional Gain: Range 0.1 to 30.0, Default Setting 1.0
Proportional gain acts as a multiplier of the difference between the Feedback and Set-point signals. The PID controller firstly determines the
PID Error, assuming direct operation
PID Error = PID Set-point – PID Feedback
The proportional gain is then used to multiply this error. If the Integral and Differential Time constants are both set to zero,
PID Output = Proportional Gain x (PID Set-point – PID Feedback)
A large value of P-gain will cause a greater change in output frequency for a small difference between the Feedback and Set-point. If the value
is too large, the system is likely to be unstable and motor output speed will often overshoot the set-point. Higher values are acceptable on
dynamic applications requiring fast response. Lower values should be used for slower responding systems, such as fan and pump control
applications. If the system tends to overshoot, reducing the P gain will have an effect of reducing the overshoot.
P3-02 Integral Time Constant: Range 0.0 to 30.0, Default Setting 1.0
The integral time constant is a time based function, which modifies the output of the PID controller based on the change in PID Error over a
defined time period. The effect of the Integral Time Constant is always to try to reduce the PID Error towards zero (so that Feedback = Set-
Summary of Contents for HVAC H2
Page 1: ......
Page 72: ...User Guide Revision 1 12 72 82 H2MAN BE_V1 11...







































































