






















User Guide Revision 1.12
64
12.2.2.
Modbus Control & Monitoring Registers
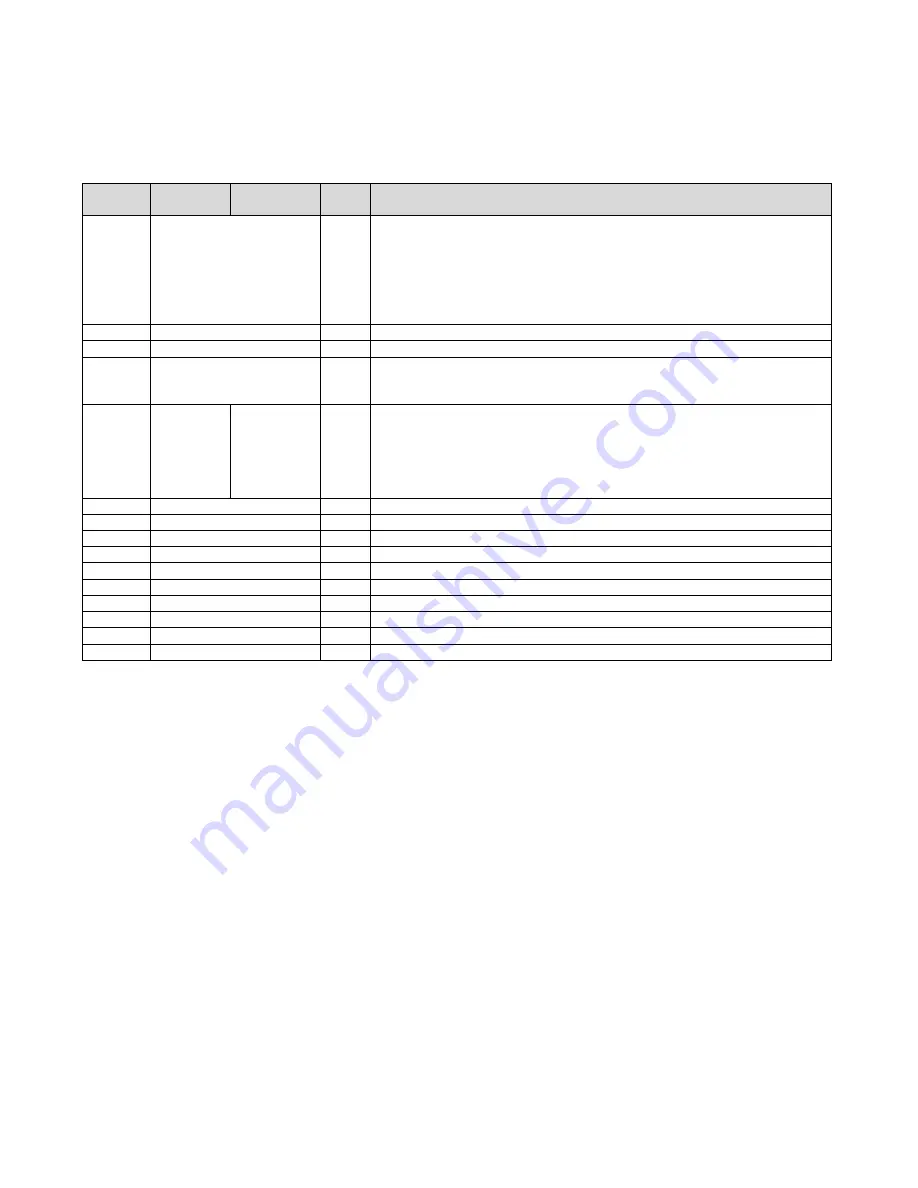
The following is a list of accessible Modbus Registers available in the drive.
Registers 1 and 2 can be used to control the drive providing that Modbus RTU is selected as the primary command source (P1-12 = 4)
Register 4 can be used to control the acceleration and deceleration rate of the drive providing that Fieldbus Ramp Control is enabled
(P5-07 = 1)
Registers 6 to 24 can be read regardless of the setting of P1-12
Register
Number
Upper Byte
Lower Byte
Read
Write
Notes
1
Command Control Word
R/W
Command control word used to control the drive when operating with Modbus RTU.
The Control Word bit functions are as follows :-
Bit 0 : Run/Stop command. Set to 1 to enable the drive. Set to 0 to stop the drive.
Bit 1 : Fast stop request. Set to 1 to enable drive to stop with 2
nd
deceleration ramp.
Bit 2 : Reset request. Set to 1 in order to reset any active faults or trips on the drive.
This bit must be reset to zero once the fault has been cleared.
Bit 3 : Coast stop request. Set to 1 to issue a coast stop command.
2
Command Speed Reference
R/W
Set-point must be sent to the drive in Hz to one decimal place, e.g. 500 = 50.0Hz
3
Command Torque Reference
R/W
Set-point must be sent to the drive in % to one decimal place, e.g. 2000 = 200.0%
4
Command Ramp times
R/W
This register specifies the drive acceleration and deceleration ramp times used when
Fieldbus Ramp Control is selected (P5-08 = 1) irrespective of the setting of P1-12. The
input data range is from 0 to 60000 (0.00s to 600.00s)
6
Error code
Drive status
R
This register contains 2 bytes.
The Lower Byte contains an 8 bit drive status word as follows :-
Bit 0 : 0 = Drive Disabled (Stopped), 1 = Drive Enabled (Running)
Bit 1 : 0 = Drive Healthy, 1 = Drive Tripped
The Upper Byte will contain the relevant fault number in the event of a drive trip.
Refer to section 15.1 for a list of fault codes and diagnostic information
7
Output Frequency
R
Output frequency of the drive to one decimal place, e.g.123 = 12.3 Hz
8
Output Current
R
Output current of the drive to one decimal place, e.g.105 = 10.5 Amps
9
Output Torque
R
Motor output torque level to one decimal place, e.g. 474 = 47.4 %
10
Output Power
R
Output power of the drive to two decimal places, e.g.1100 = 11.00 kW
11
Digital Input Status
R
Represents the status of the drive inputs where Bit 0 = Digital Input 1 etc
20
Analog 1 Level
R
Analog Input 1 Applied Signal level in % to one decimal place, e.g. 1000 = 100.0%
21
Analog 2 Level
R
Analog Input 2 Applied Signal level in % to one decimal place, e.g. 1000 = 100.0%
22
Pre Ramp Speed Reference
R
Internal drive frequency set-point
23
DC bus voltages
R
Measured DC Bus Voltage in Volts
24
Drive temperature
R
Measured Heatsink Temperature in °C
12.2.3.
Modbus Parameter Access
All User Adjustable parameters (Groups 1 to 5) are accessible by Modbus, except those that would directly affect the Modbus
communications, e.g.
P5-01 Drive Fieldbus Address
P5-03 Modbus RTU Baud Rate
P5-04 Modbus RTU Data Format
All parameter values can be read from the drive and written to, depending on the operating mode of the drive – some parameters cannot be
changed whilst the drive is enabled for example.
When accessing a drive parameter via Modbus, the Register number for the parameter is the same as the parameter number,
E.g. Parameter P1-01 = Modbus Register 101.
Modbus RTU supports sixteen bit integer values, hence where a decimal point is used in the drive parameter, the register value will be
multiplied by a factor of ten,
E.g. Read Value of P1-01 = 500, therefore this is 50.0Hz.
For further details on communicating with the drive using Modbus RTU, please refer to your local Sales Partner.
Summary of Contents for HVAC H2
Page 1: ......
Page 72: ...User Guide Revision 1 12 72 82 H2MAN BE_V1 11...







































































