





























Operation
Operating manual CARLO EP & Classic
V2.10 E
Page 26 of 56
8.1.3 After Use
For the washing, the slings are classified as accessory and therefore as medical
device. The slings may be cleaned and disinfected in accordance with the
manufacturer’s instructions.
During the washing and drying, no mechanical pressure must be applied, such as dry
press, rotary iron. This could damage the sling parts and impair the operation and the
safety of the sling or even destroy the sling.
The sling loops must be checked and, if required, cleaned after each use. The
washing temperatures must not exceed the temperature specified on the sling. Please
use common household detergents only. Do not iron hot. The plastic clips must be
checked for possible damages after each wash.
8.2 Operation of the CARLO Alu
The spreader bar of the CARLO Alu sling hoist is raised or lowered by means of the
handset, which is included in the delivery. The direction of motion is indicated by
symbols. The rear castors have (ease-to-operate) brakes. When lifting a
patient/resident, the brakes of the castors must be activated to avoid any uncontrolled
movement of the CARLO Alu.
Travel path
When using the CARLO Alu, make sure that the travel path of the CARLO Alu is not
narrowed by obstacles or other elements (e.g. wall racks, etc.). Remember also that
the maximum height is limited to 2175 mm. Take extreme care when passing through
door frames.
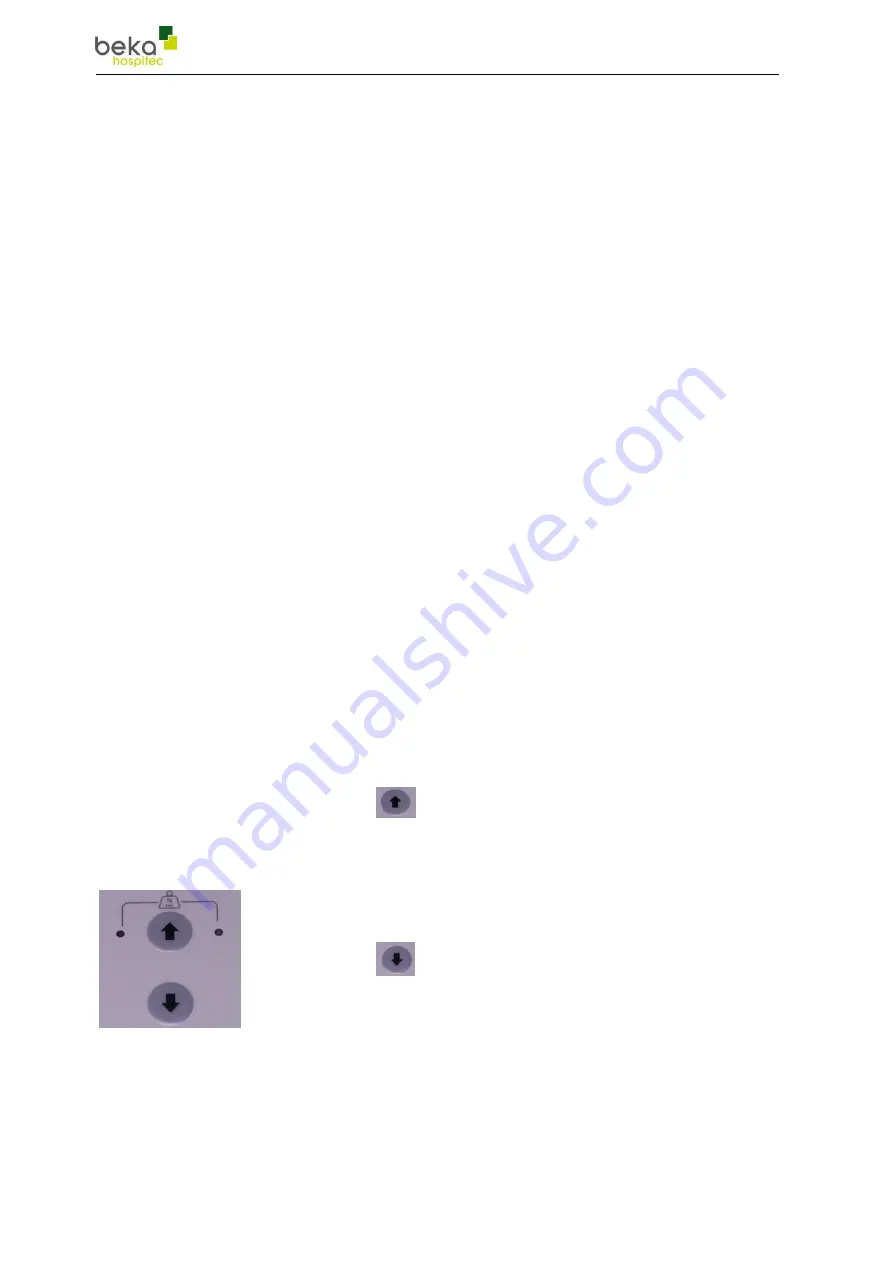
8.2.1 Explanation of the Functions of the Handset
The different functions of the CARLO Alu can be activated by means of the handset.
Raising and
Lowering the
Spreader Bar
Keep the button
of the handset pressed to raise the spreader
bar. The spreader bar is raised. Release the button as soon as the
spreader bar has reached the desired position. The upward
movement of the spreader bar is stopped.
When the highest possible position is reached, the upward movement
is automatically stopped.
Keep the button
of the handset pressed to lower the spreader
bar. The spreader bar is lowered. Release the button as soon as the
spreader bar has reached the desired position. The downward
movement of the spreader bar is stopped.
When the lowest possible position is reached, the downward
movement is automatically stopped.






















































