











16
17
CHANNEL IS PRIMARY/BACKUP: For a redundant communication the INTELLIBUS has 2 channels
connected to the Profibus line. The one that got a data exchange state is named primary channel
and the other one backup channel.
1 or 2 CHANNELS AVAILABLE: Indication of how many channels are available.
SR/FR MODE: SR mode uses a redundant fieldbus with 2 lines, FR mode uses a redundant fieldbus
with only one line.
SR mode is the default configuration.
COMMUNICATION FAULT: There is a communication fault between and INTELLIBUS
module.
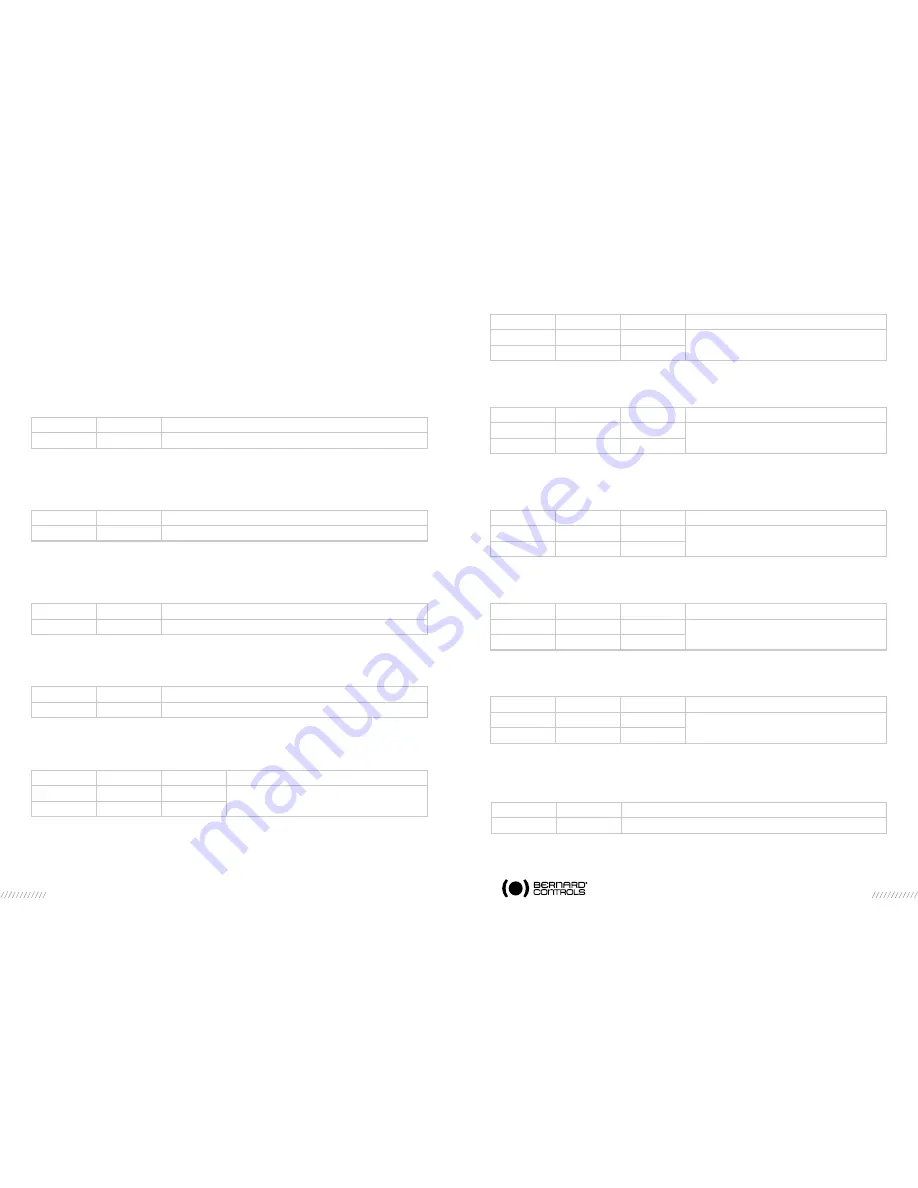
Address 8 : Open breakout max torque
OPEN BREAKOUT MAX TORQUE: Open breakout max torque during the last electrical operation
(in %). This indication is available only if closing is based on torque.
Address 9 : Close tight max torque
CLOSE TIGHT MAX TORQUE: Close tight max torque during the last electrical actuation (in %).
This indication is available only if closing is based on torque.
Address 10 : Opening max torque
OPENING MAX TORQUE: Opening max torque during the last electrical actuation (in %)
Address 11 : Closing max torque
CLOSING MAX TORQUE: Closing max torque during the last electrical actuation (in %)
Address 12 and 13 : Starts last 12 hours
STARTS LAST 12 HOURS: this data corresponds to the number of actuator starts during the last
twelve hours and provides information on the actuator recent activity. It is of interest to know
whether the actuator has not been excessively operated, when used for regulation purposes, for
example
Address 14 to 17 : Number of starts
TOTAL NUMBER OF STARTS: to obtain the accumulated figures since actuator manufacturing.
Address 18 to 21 : Running time
TOTAL RUNNING TIME. To obtain the accumulated figures since actuator manufacturing. Unit is
1/10 sec
Address 22 to 25 : Partial number of starts
PARTIAL NUMBER OF STARTS: Number of starts since the last reset.
Address 26 to 29 : Partial running time
PARTIAL RUNNING TIME: Total running time since the last reset. Unit is 1/10 sec.
Address 30 and 31: proportional indication
ACTUATOR POSITION: This indication is the actuator position feedback (same as address 4)
but with a high resolution. Actuator position expressed in 0.1% of opening (0=closed to 1000=open).
Address 32: external device input signal
EXTERNAL DEVICE INPUT SIGNAL: A hardwired signal (for example 4 to 20mA) is coming from
an other device and uses the actuator Profibus interface to communicate the value.
Bit n°
Value
Description
Bit 0 to 7
0-150
OPEN BREAKOUT MAX TORQUE IN %
Bit n°
Value
Description
Bit 0 to 7
0-150
CLOSE TIGHT MAX TORQUE IN %
Bit n°
Value
Description
Bit 0 to 7
0-150
OPENING MAX TORQUE IN %
Bit n°
Value
Description
Bit 0 to 7
0-150
CLOSING MAX TORQUE IN %
Address
Bit n°
Value
Description
12
Bit 0 to 7
MSB
Starts last 12 hours (2 bytes)
13
Bit 0 to 7
LSB
Address
Bit n°
Value
Description
14
Bit 0 to 7
MSB
Number of starts (4 bytes)
17
Bit 0 to 7
LSB
Address
Bit n°
Value
Description
18
Bit 0 to 7
MSB
Running time (4 bytes)
21
Bit 0 to 7
LSB
Address
Bit n°
Value
Description
22
Bit 0 to 7
MSB
Partial number of starts (4 bytes)
25
Bit 0 to 7
LSB
Address
Bit n°
Value
Description
26
Bit 0 to 7
MSB
Partial running time (4 bytes)
29
Bit 0 to 7
LSB
Address
Bit n°
Value
Description
30
Bit 0 to 7
MSB
Actuator position in % of opening (2 bytes
31
Bit 0 to 7
LSB
Bit n°
Value
Description
Bit 0 to 7
0 to 256
EXTERNAL DEVICE INPUT SIGNAL







































































