






















INSTALLATION MANUAL
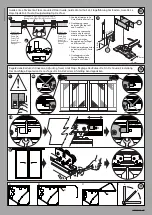
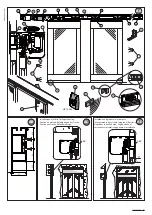
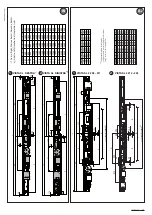
10) FLOOR-MOUNTED DOOR GUIDE (Fig. M)
- Framed doors (Fig. M Rif. 3)
- Glass doors (Fig. AE)
- Breakout doors
See the relevant instruction manual for their assembly.
11) ADJUSTING TRAVEL LIMIT STOPS (Fig. N)
If the positions of the RH and LH travel limit stops (parts. 10 Fig. AA) need to be
fine-tuned, carefully check the travel and alignment of the runners carrying the
doors.
It is important to remember that the position of the travel limit stops also deter-
mine the control board’s self-learning.
----------------------------------------------------------
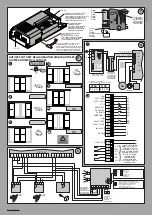
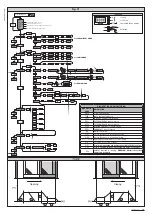
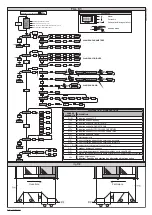
12) ARIA CONTROL BOARD
12.1) TERMINAL BOARD WIRING (Fig. P)
WARNINGS - When performing wiring and installation, refer to the
standards in force and, whatever the case, apply good practice prin-
ciples.
The wires carrying a very low safe voltage (24V) must be kept physically separate
from low-voltage wires, or they must be suitably insulated with at least 1mm of
additional insulation. Wires must be secured with additional fastening near the
terminals, using devices such as cable clamps.
13.1) FACTORY CONNECTIONS (Fig. Q Rif. 1)
TERMINAL
DESCRIPTION
JP2-JP4
Power supply unit wiring
JP2= brown
JP4= white/blue
JP7-JP8
Gearbox wiring
JP7=brown
JP8=white/blue
JP12
Encoder wiring
JP19
Solenoid lock wiring
13.2) USER CONNECTIONS (Fig. P - Q)
TERMINAL
DESCRIPTION
L
PHASE
N
NEUTRAL
EARTH
JP18
Universal palmtop programmer connector
JP10
Connector for additional optional boards
1
Controllers common
2
OPENING PHOTOCELL (NC) input
3
CLOSING PHOTOCELL (NC) input
4
STOP (NC) input
5
EXT. RADAR control (NO) input
6
INT. RADAR control (NO) input
7
OPEN KEY (NO) input
8
EMERGENCY input
9
Control common
10
OPENING PHOTOCELL FAULT (NO) input
11
CLOSING PHOTOCELL FAULT (NO) input
12-13
24V~ VSAFE 180mA max output
Power supply to devices with checking function.
14-15
Serial RS485.
14 = A
15 = B
Connection to external programming devices.
Controllers common
Connection of remote door in cage mode
16-17
24V~ 500mA max output
Power supply to radar controls, photocells or other devices.
18-19-20
“Door status” output
18 = NO (voltage-free contact)
19 = COM (voltage-free contact)
20 = NC (voltage-free contact)
21-22-23
“Alarm” output
21 = NO (voltage-free contact)
22 = COM (voltage-free contact)
23 = NC (voltage-free contact)
14) CENTRAL PROGRAMMING (Fig.C1)
14.1) PARAMETER MENU
(
PARA
)
(TABLE “A” PARAMETERS)
14.2) LOGIC MENU (
logic
)
(TABLE “B” LOGIC)
14.3) RADIO MENU (
RADIO
)
Logic
Description
add open
Add Start Open
associates the desired key with the Open command
add ey
Add Open Key
associates the desired key with the Open Key command
read
Read
Checks a key of a receiver and, if memorized, returns the
number of the receiver in the memory location (from 01 to
63) and number of the key (T1-T2-T3 or T4).
erase 64
Erase List
WARNING!
Erases all memorized remote controls from
the receiver’s memory.
cod RX
Read receiver code
Displays receiver code required for cloning remote controls.
k
ON =
Enables remote programming of cards via a previously me-
morized W LINK transmitter. It remains enabled for 3 minutes
from the time the W LINK remote control is last pressed.
OFF=W LINK programming disabled.
- IMPORTANT NOTE: THE FIRST TRANSMITTER MEMORIZED MUST BE
IDENTIFIED BY ATTACHING THE KEY LABEL (MASTER).
In the event of manual programming, the first transmitter assigns the RECEIVER’S
KEY CODE: this code is required to subsequently clone the radio transmitters.
The Clonix built-in on-board receiver also has a number of important advanced
features:
• Cloning of master transmitter (rolling code or fixed code)
• Cloning to replace transmitters already entered in receiver
• Transmitter database management
• Receiver community management
To use these advanced features, refer to the universal handheld programmer’s
instructions and to the CLONIX Programming Guide, which come with the uni
-
versal handheld programmer device.
14.4) LANGUAGE MENU (
language
)
Used to set the programmer’s language on the display.
14.5) DEFAULT MENU (
default
)
Restores the controller’s default factory settings.
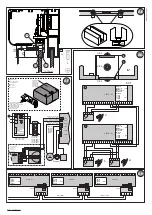
14.6) AUTOSET MENU (
Autoset
)
(Fig. R)
When this function is activated, the parameters relating to door movement and
obstacle detection are automatically set to their optimum values:
- Running speed during opening
- Running speed during closing
- Opening slow-down distance
- Closing slow-down distance
- Opening deceleration distance
- Closing deceleration distance
- Acceleration
- Deceleration
- Opening torque
- Closing torque
3 complete cycles are performed as the autoset function is run.
While autoset is running, the anti-crush function is not active.
The door must not be stopped or slowed down at any point during its
travel while autoset is running.
15) CENTRAL OPERATION:
15.1) DOOR OPERATION MODE
Mode 0) Standard operation door (Fig. S)
Reaction to commands:
- Open key:
Opens at high speed, closes at low speed. Opens and activates an Open-key operation,
if activated while the door is open, it sets clear time to zero; reopens if activated during
closing. With the door open, the clear-time countdown is active. During closing, pho
-
tocells stop movement instead of reversing. Once they are cleared, closing is resumed
following the TCA countdown. During the Open-key operation, the radars are not
active
- External radar:
Performs a high-speed cycle. Opens, with the door open, it triggers the auto
-
matic closing time; if activated while the door is open, it sets automatic closing
time to zero. If clear time was active - activated by an Open-key operation - with
the door open, this time is converted into automatic closing time. Following
the automatic closing time, the door closes. During closing, it causes the door
to open again.
D811590 00100_01
VISTA SL
- 21







































































