







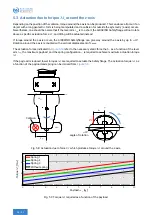














5.3 Actuation due to torque
M
z
around the z-axis
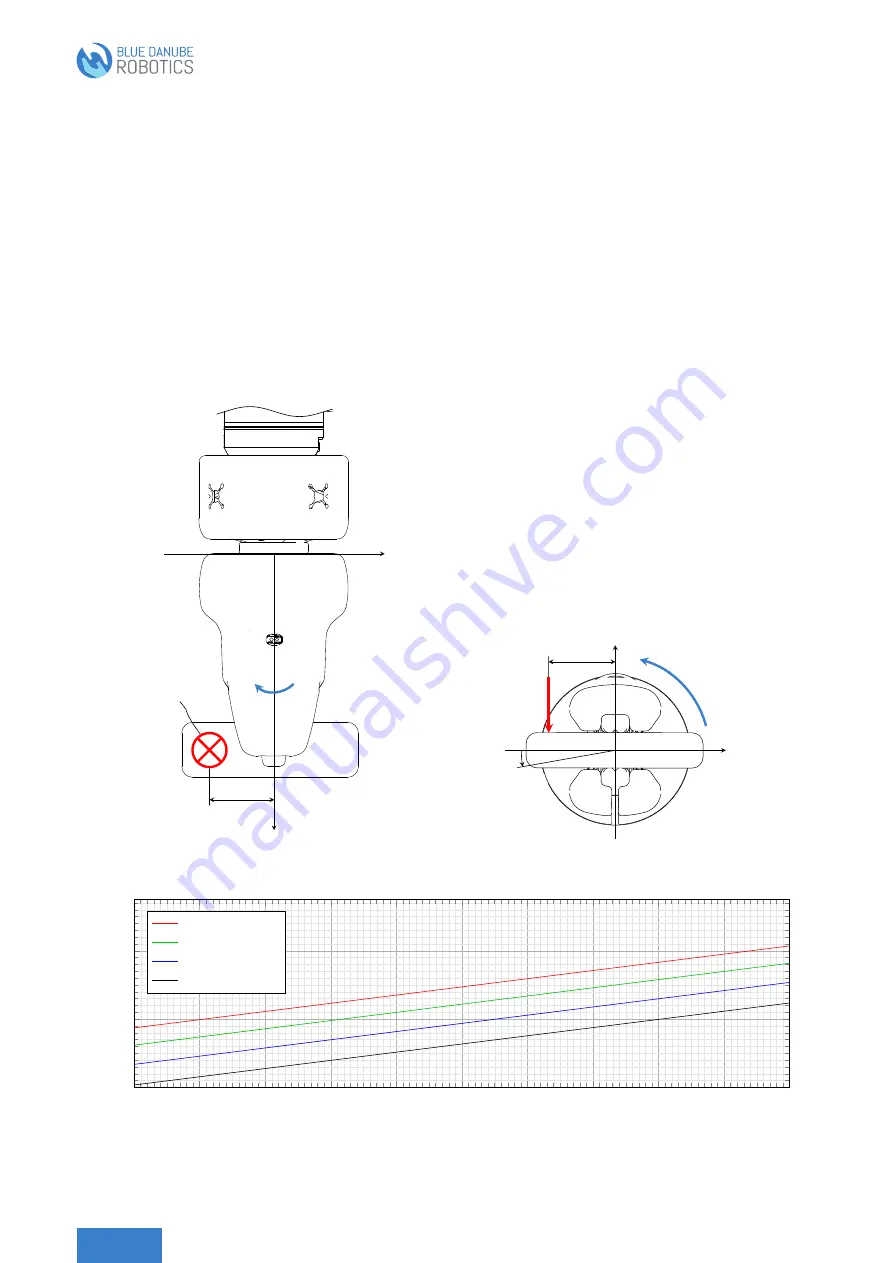
Depending on the position of the collision, torque around the z-axis can be produced. This can above all occur if an
object with a long geometric form is being manipulated and a collision far outside the symmetry (z-axis) occurs.
Nevertheless, one should be aware that if the lever arm
l
xy
is too short, the AIRSKIN® Safetyflange will not rotate
above a specific actuation force
F
T
, and tilting will be actuated instead.
If torque around the z-axis occurs, the AIRSKIN® Safetyflange can give way around the z-axis by up to
±
10
°.
Rotation around the z-axis is coupled with a vertical displacement of
3 mm
.
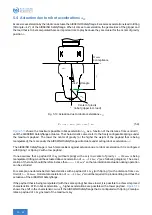
The actuation forces indicated in
refer to the necessary static force that – as a function of the lever
arm
l
xy
, the maximum payload, and the spring configuration – is required to achieve maximum actuation torque
M
z
.
If the payload is reduced, lower torques
M
z
are required to actuate the Safetyflange. The actuation torque
M
z
as
a function of the payload and spring can be derived from
x
z
F
T
Collision
l
xy
M
z
m
G
m
L
x
y
F
T
M
z
l
xy
±
10
°
angle of rotation
Fig. 5.8: Actuation due to force
F
T
which produces torque
M
z
around the z-axis.
0
1
2
3
4
5
6
7
8
9
10
0
2
4
Payload
m
g
[
kg
]
Tor
que
M
z
[
N
m
]
Spring 1
Spring 2
Spring 3
Without spring
Fig. 5.9: Torque
M
z
required as a function of the payload.







































































