




















5 Forces and torques
The AIRSKIN® Safetyflange has been developed so that it actuates in the case of a collision and once it has
reached specific breakaway force (
<
110 N
in the quasi-static case). The breakaway force that is required for
actuation can be produced in a variety of ways, and – depending on the weight of the robot gripper, the load that
is being manipulated, the tilt angle of the robot, and the acceleration produced by the robot during operation – can
be of varying magnitude.
Furthermore, the position in which a collision occurs and which is thus responsible for the lever arm can substan-
tially impact on the actuation force that is required.
The correct configuration of the spring plays a crucial role in fulfilling the characteristics described in the following
sections (see
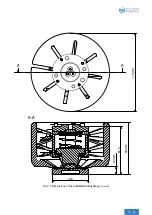
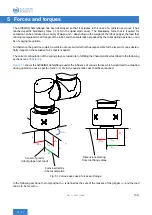
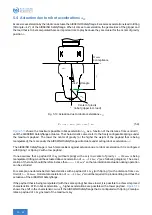
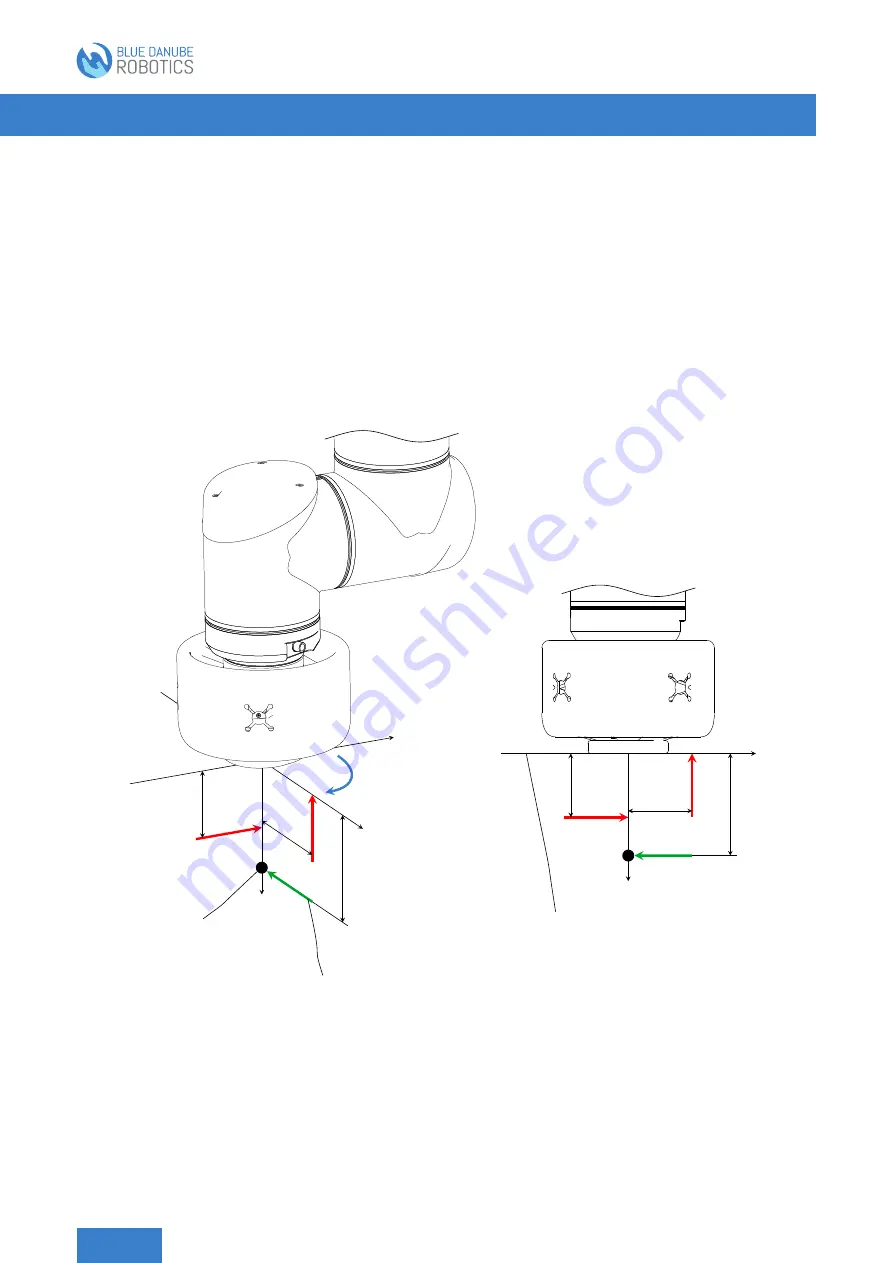
shows the AIRSKIN® Safetyflange under the influence of various forces which would lead to actuation
during operation once a specific force (
<
110 N
in the quasi-static case) had been reached.
x
y
z
M
z
F
z
F
a
l
s
l
xy
F
xy
l
z
Center of gravity
(robot gripper incl. load)
Force exerted by
robot acceleration
x
z
F
z
l
xy
F
xy
l
z
F
a
l
s
Dimensions starting
from tool flange plane
Fig. 5.1: Various use cases: forces and torque.
In the following sections, the total payload
m
g
is defined as the sum of the masses of the gripper
m
G
and the load
that is to be moved
m
L
.
m
g
=
m
G
+
m
L
(5.1)
































































