



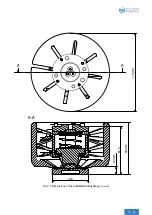
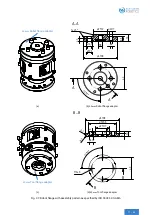

















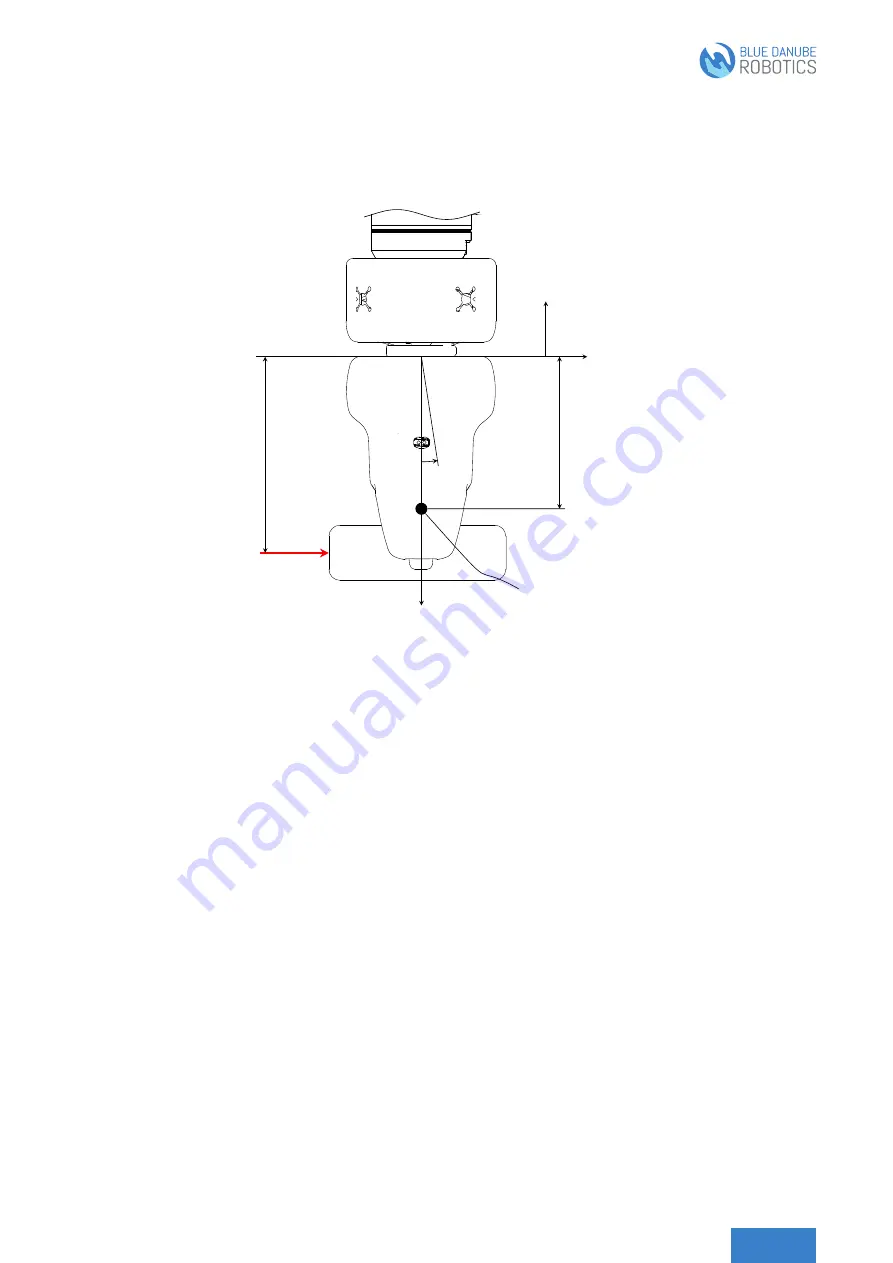
5.1 Actuation due to horizontally acting forces
F
xy
The horizontal actuation force arises when lateral collisions (forces in the xy-plane) occur. Depending on the
position of the collision, this can lead to either lateral tilting (tilt angle
±
8
.
8
°) or rotation around the z-axis (angle
of rotation
±
10
° coupled with displacement along the z-axis of
3 mm
).
x
z
11 mm
z-compliance
l
s
≤
200 mm
±
8
.
8
° Tilt angle
F
xy
l
z
m
G
m
L
Center of gravity
(robot gripper incl. load)
Fig. 5.2: Actuation due to horizontally acting forces
F
xy
.
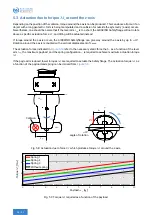
By referring to the characteristic curves in
and
one can read off the static force
F
xy
that –
depending on the force application point
l
z
and the payload that is to be manipulated
m
g
(g load) – is
required to cause tilting.
Depending on the handling weight, the AIRSKIN® Safetyflange can be configured with different springs (see
). The diagram in
shows the maximum actuation forces with the maximum possible payload,
together with the respective spring. Any payload below this figure produces lower actuation forces.
For example, in the case of Spring 2 the actuation force that is required decreases if – instead of
5 kg
– the payload
only amounts to
2
.
5 kg
(see
). To prevent the characteristics from varying too much, there is the option
of switching to the next (lower) spring if the payload is too low.
The basis for actuation due to a horizontal force effect
F
xy
is the tilt angle of
±
8
.
8
°. The AIRSKIN® Safetyflange
actuates following minor deflections (
>
2
.
5
°) of the tilt angle. The actuation force indicated in
is the
required static force that must take effect in order to displace the AIRSKIN® Safetyflange
3
.
5
°. The actuation
force changes as a function of the lever arm
l
z
, the center of gravity position
l
s
, the payload
m
g
, and the spring
configuration.
The characteristic curves from
refer to a distance from centroid of
l
s
=
200 mm
, which means that
with the correct spring configuration and payload the maximum actuation force does not exceed the limit of
110 N
(
F
xy
<
110 N
). So long as the distance from centroid
l
s
lies within the
200 mm
(
l
s
≤
200 mm
), the actuation force
F
xy
can be derived from the characteristic curves.
If the center of gravity is lower (
l
s
>
200 mm
), this will produce deviating actuation forces whereby the limit of
110 N
can be exceeded (
F
xy
>
110 N
). A higher center of gravity position (
l
s
<
200 mm
) leads to lower actuation
forces.
































































