
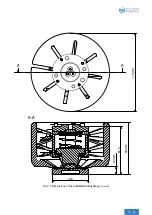








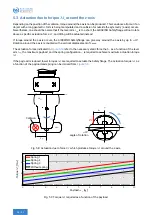

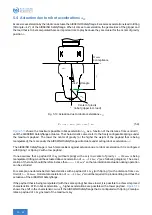











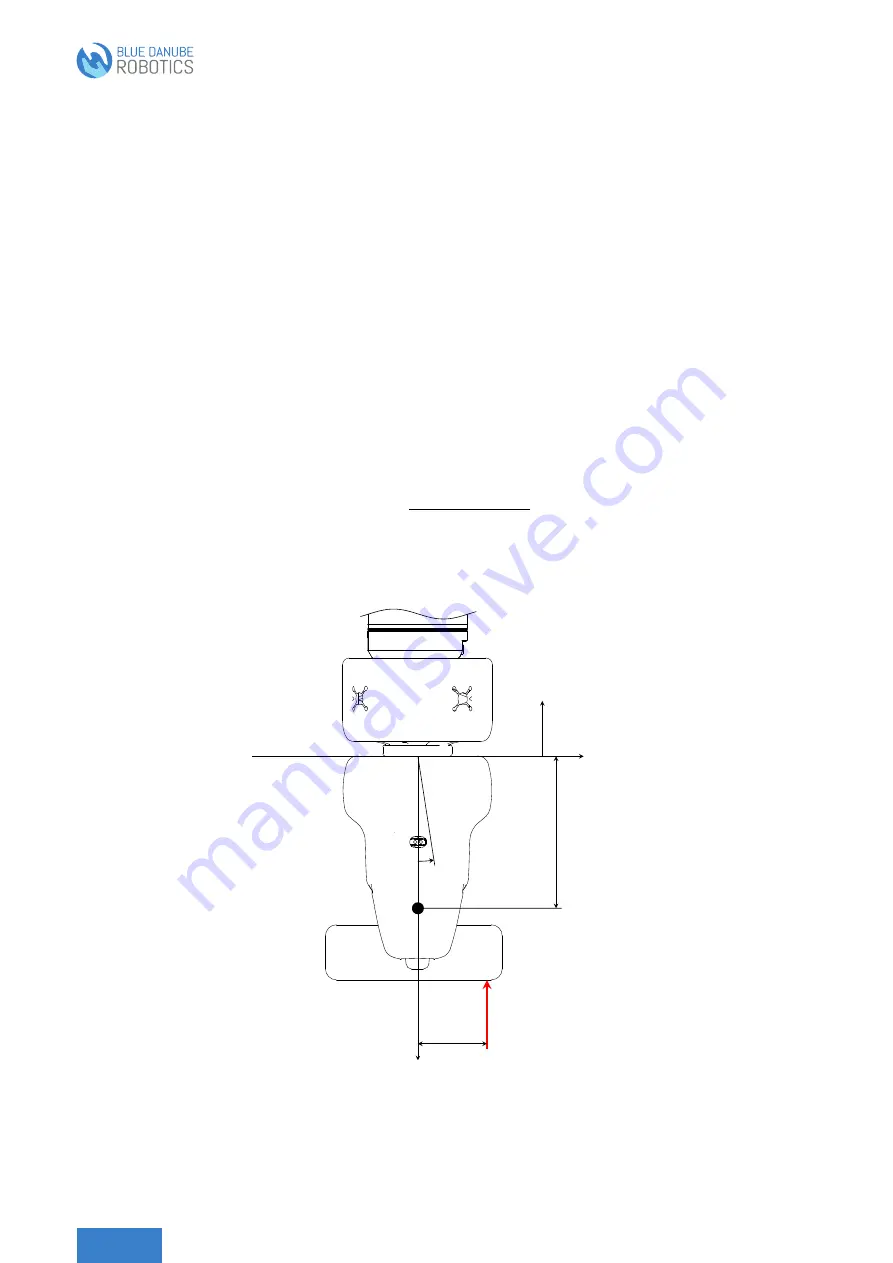
5.2 Actuation due to vertically acting forces
F
z
The vertical actuation force arises if forces act along the z-axis. If the spring is correctly configured, the maximum
actuation force is
<
110 N
. If the distance
l
xy
increases (measured from the z-axis), the actuation force becomes
lower because simple tilting rather than displacement of the entire mass is required. The maximum tilt angle is
±
8
.
8
°.
The basis for actuation due to a vertical force effect
F
z
is the z-compliance of
11 mm
. The collision object is
displaced if the lever arm
l
xy
of the force
F
z
is too small to produce tilting torque. The AIRSKIN® Safetyflange
actuates against the z-axis when confronted with only minor displacements (
<
2 mm
).
The maximum actuation force of
110 N
takes effect if – with correct spring configuration and maximum payload
– the collision object is displaced
2 mm
against the z-axis.
The actuation force
F
z
indicated in
refers to the necessary static force that – as a function of the lever
arm
l
xy
, the maximum payload, and the spring configuration – is required until tilting torque is achieved. The
characteristic curves are valid for center of gravity positions
l
s
≤
200 mm
.
The additional or reduced force caused by a deviating center of gravity distance
l
s
, which is required to trigger,
can be calculated using the following formula:
F
z
±
=
0
.
6
·
m
g
·
(
l
s
−
0
.
2
)
l
xy
+
0
.
0225
(5.3)
In
examples are given with deviating center of gravity distances of
l
s
=
60 mm
and
l
s
=
300 mm
. The
procedure for applying the formula to the curves is the same.
x
z
11 mm
z-compliance
l
s
±
8
.
8
° Tilt angle
F
z
l
xy
m
G
m
L
Fig. 5.5: Actuation due to vertically acting forces
F
z
.





































































