
























0
50
100
150
200
250
300
350
400
450
500
0
1
2
3
4
5
6
7
8
9
10
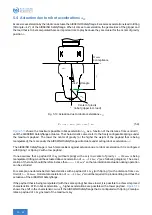
Distance from centroid
l
s
[
mm
]
Robot
acceler
ation
α
R
[
m
/
s
2
]
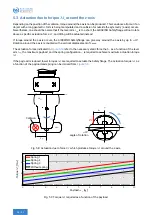
Spring 1 with
2
.
5 kg
payload
Spring 2 with
5 kg
payload
Spring 3 with
7
.
5 kg
payload
Without spring, with
10 kg
payload
Fig. 5.13: Robot acceleration
α
R
required as a function of the centroidal distance
l
s
.
0
50
100
150
200
250
300
350
400
450
500
0
1
2
3
4
5
6
7
8
9
10
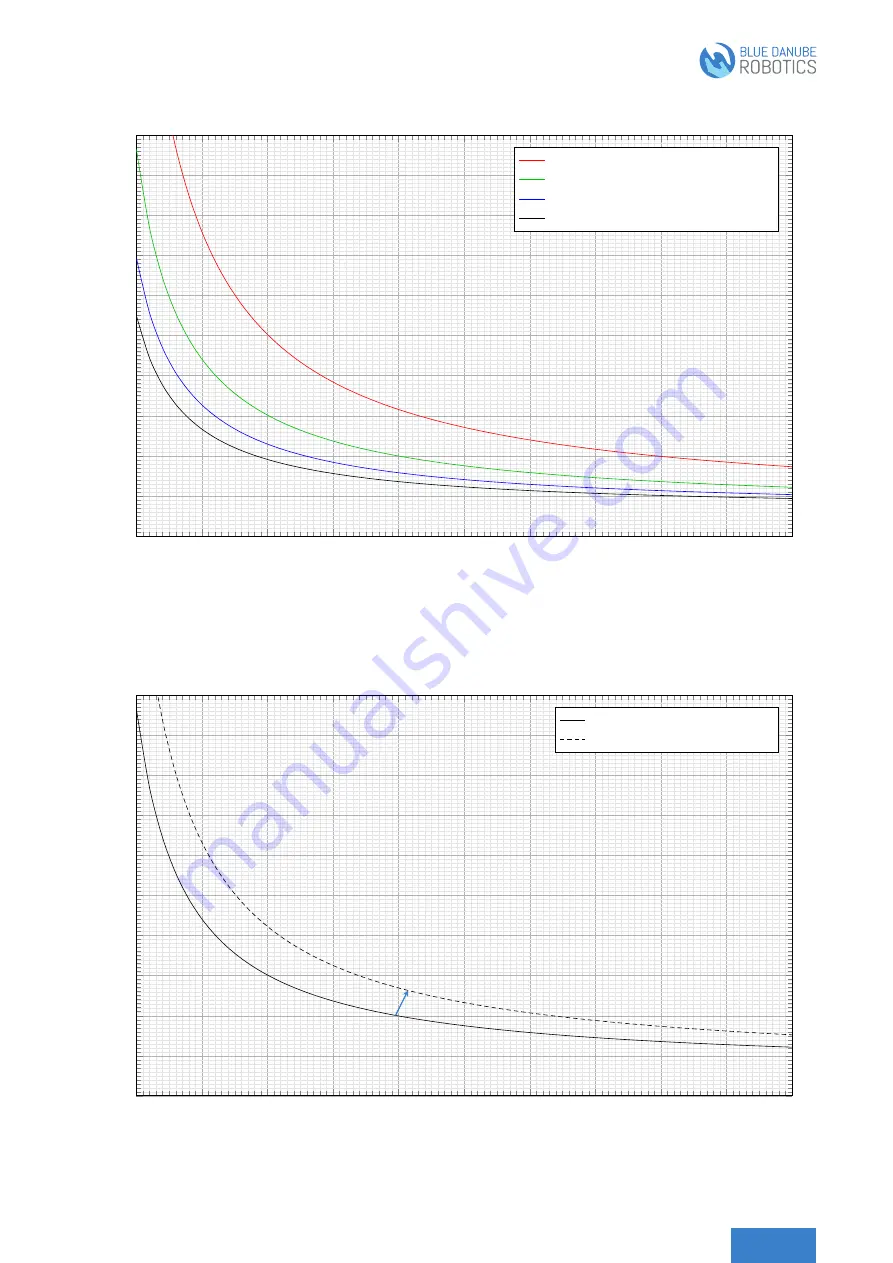
Distance from centroid
l
s
[
mm
]
Robot
acceler
ation
α
R
[
m
/
s
2
]
Spring 2 with
5 kg
payload
Spring 2 with
2
.
5 kg
payload
Fig. 5.14: Change to the characteristic curve with a lower payload.







































































