







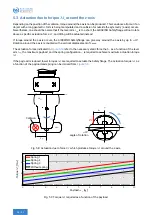


















5.5 Actuation due to tilts
Θ
on the part of the robot
If at all possible, the AIRSKIN® Safetyflange should always be used without a tilt angle
Θ
that is caused by the
robot. Minor tilt angles
Θ
that are caused by the robot are indeed possible, but if this is the case one can no longer
ensure that the maximum actuation force of
110 N
is not exceeded.
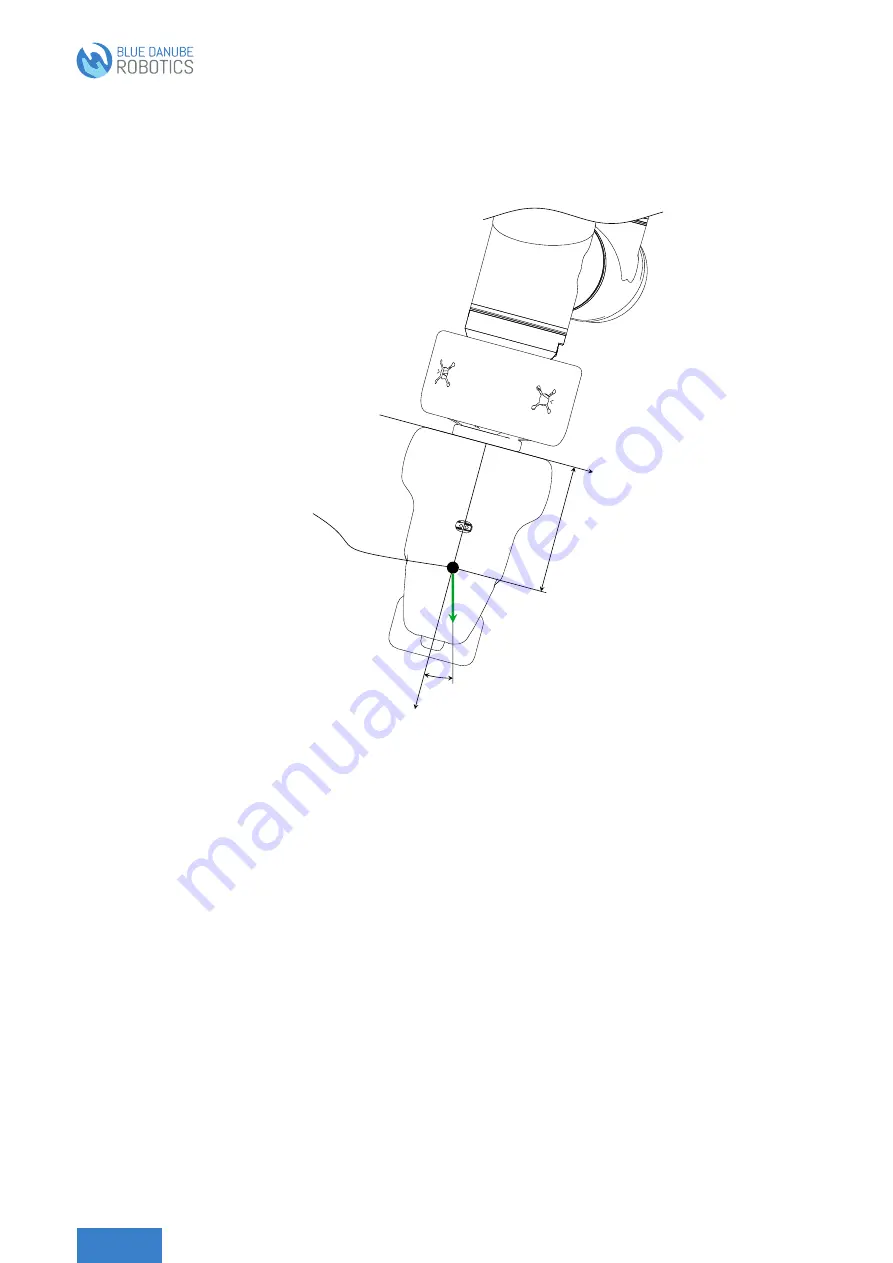
x
z
l
s
m
G
m
L
Center of gravity
(robot gripper incl. load)
F
g
Θ
Fig. 5.15: Actuation due to tilts
Θ
on the part of the robot.
shows the characteristic curves which represent the tilt angle
Θ
as a function of the center of gravity
position
l
s
and the maximum payload that can be manipulated with the corresponding spring. If the weight of
the payload increases or the center of gravity position is lower, tilting will even be triggered with smaller angle
positions
Θ
.
For example, a payload of
10 kg
with a center of gravity at
l
s
=
200 mm
(without spring) will already tilt if the robot
tilts by
Θ
=
4
° (see
). In this example, minor deflections (under
4
°) that are caused by the robot may
indeed be possible, yet the AIRSKIN® Safetyflange is not designed so that (in the case of robot tilt) actuation
below the stipulated limit of
110 N
will occur.
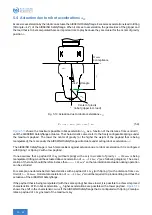
With a lower payload, e.g.
2
.
5 kg
with a center of gravity of
l
s
=
100 mm
(with Spring 1), a tilt angle of
Θ
=
23
.
2
°
(see
) would be achievable, yet above such a high tilt angle the actuation force in the case of a collision
is strongly influenced. This is why the tilt of the AIRSKIN® Safetyflange during operation should be kept as low as
possible (under
2
°) so that tilting torque due to the tilt angle
Θ
is not too strongly influenced.
If the payload that is being manipulated (with the same spring) is lower, it is possible to achieve better character-
istics. With tilt angle
Θ
, bigger angle positions are possible with a lower payload.
shows the shift in
the characteristic curve if the AIRSKIN® Safetyflange that is configured with Spring 2 manipulates a payload of
2
.
5 kg
instead of the maximum
5 kg
.







































































