
















10/3/2018
Newton Gripper
http://docs.bluerobotics.com/newton-gripper/#specifications
4/17
1 x 2.5 mm hex driver
1 x #1 Phillips head screwdriver
1 x Penetrator wrench
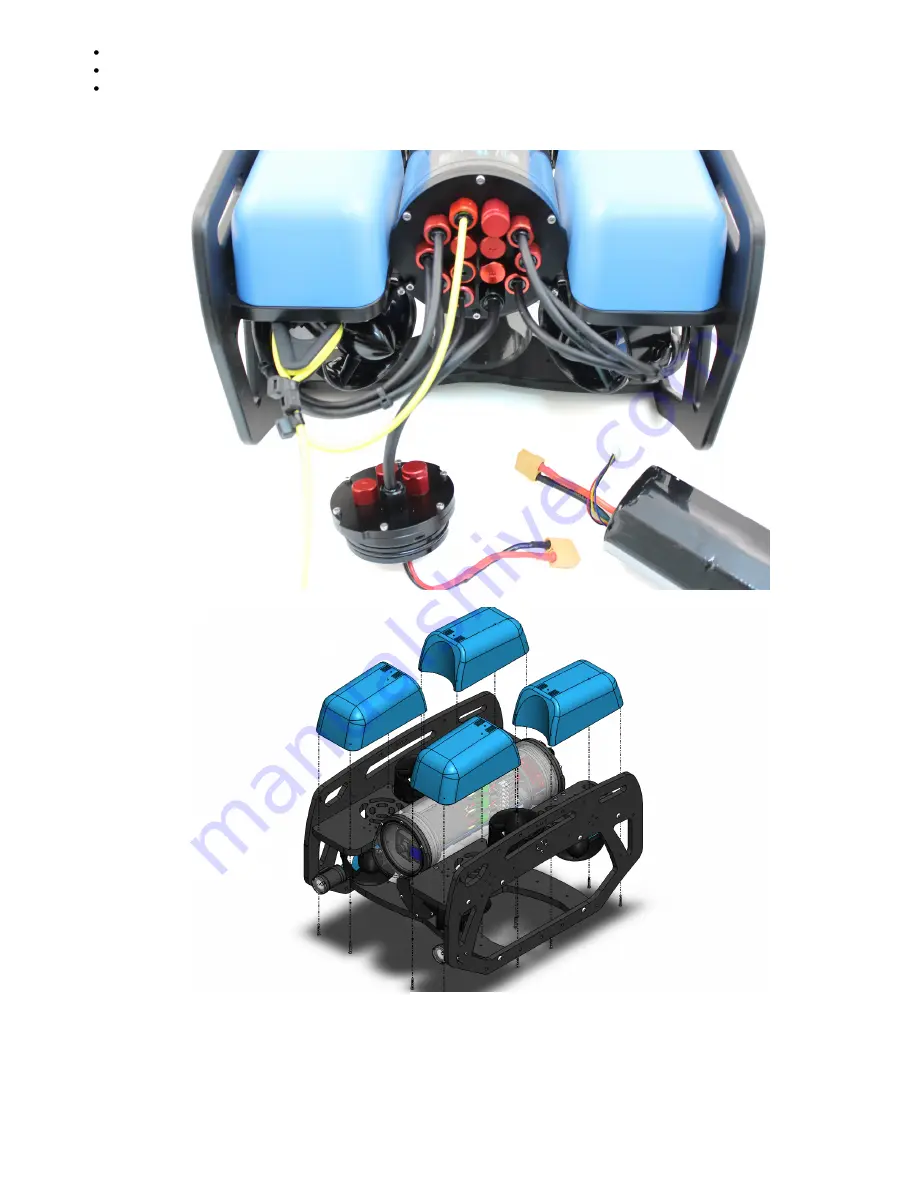
1. To ensure your ROV is completely powered o , please remove the battery completely from the 3” enclosure and place to the
side.
2. Remove the fairings and buoyancy blocks by removing the self-tapping screws that hold the fairings to the frame.
3. Remove the 4” electronics enclosure from the ROV by removing the M3x16 screws that mount the enclosure to the ROV cradle.







































































