






















BKS Terminal Disinfection Robot Product Manual v1.0
BooCax Robotics
16
/
24
www.boocax.com
8. Build map
1)
Preparation before building the map
·
Push the robot
0.5-1m
in front of the charging pile
·
Robot power >
50%
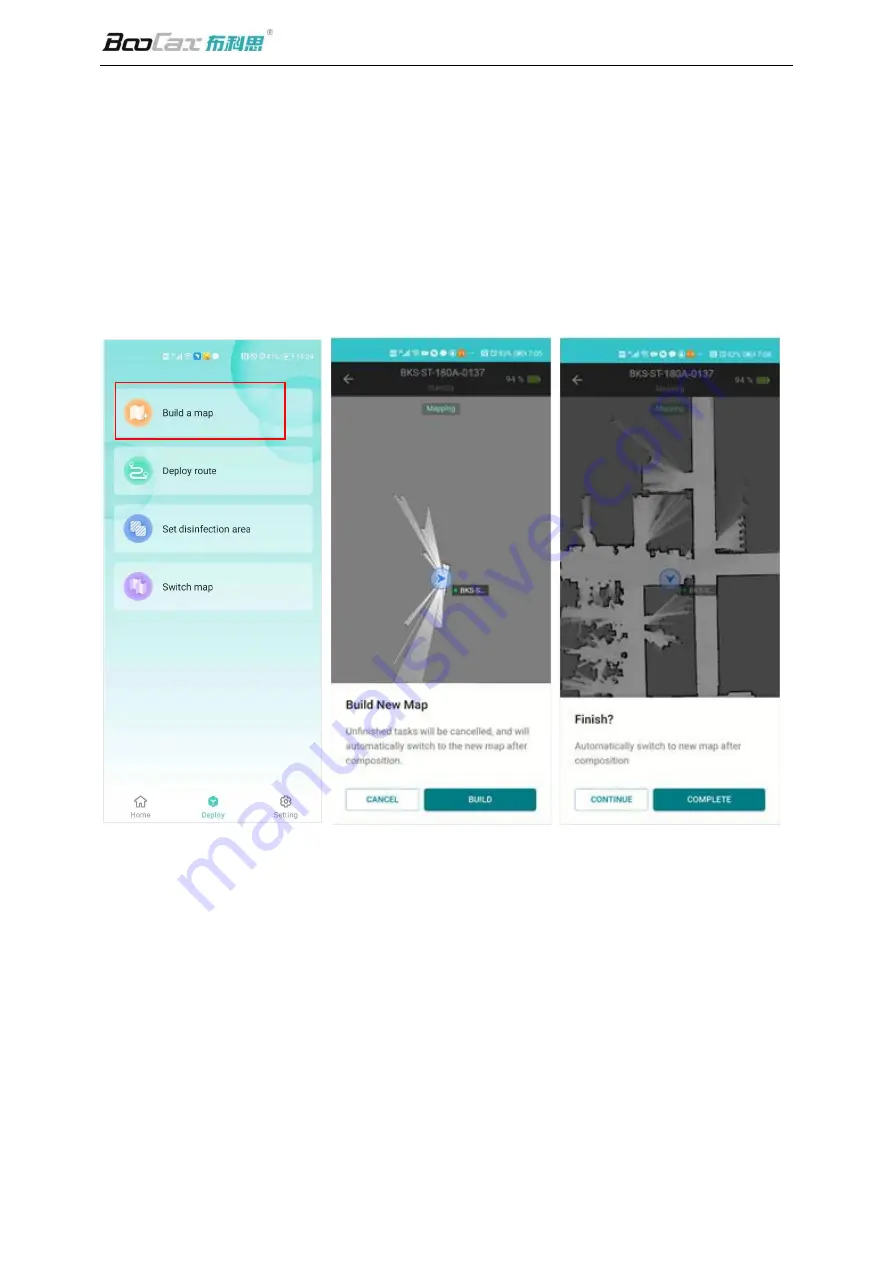
2)
Start building the map
Click "Deploy" on the homepage of App to show the "Build Map" button. Click the button to
build a two-dimensional spraying map, as shown in the following figure (
Push the robot by
hand to build the map
):
Notifications:
•
White radius
—
the range scanned by the laser;
•
Black thick line
—
the scanned obstacles (special objects such as transparent glass may not be
identified)
•
Gray area: Area that has not been scanned.
⚠
Attention:
①
When mapping by hand, push the robot forward slowly in the scene from the
charging
pile as the starting point
, and finally return to the charging pile to form a large circle;
;
②
When mapping, don't be too close to the wall and keep a distance of at least
0.5m
;
;
③
The operator must stand behind the robot to avoid leaving noise on the map
;
④
When turning,
walk slowly
so that the robot can collect as much characteristic point data
as possible
;
⑤
As laser radar does not recognize accurately in abnormal environment (glass, mirror, pure







































































