





























1 nF
1.1k
3.3k
TLP280
DigIn0
DigIn1
DigIn2
DigIn3
DigComm0
24 Volt
Power
supply
Bundle of geografical
“close” inputs with own
return current path
+
-
[See Note 3]
Application
Node
3.3k
3.3k
3.3k
3.3k
3.3k
3.3k
3.3k
1 nF
1.1k
1 nF
1.1k
1 nF
1.1k
TLP280
TLP280
TLP280
[See Note 1]
[See Note 2]
[See Note 4 about polarity]
[See Note 3]
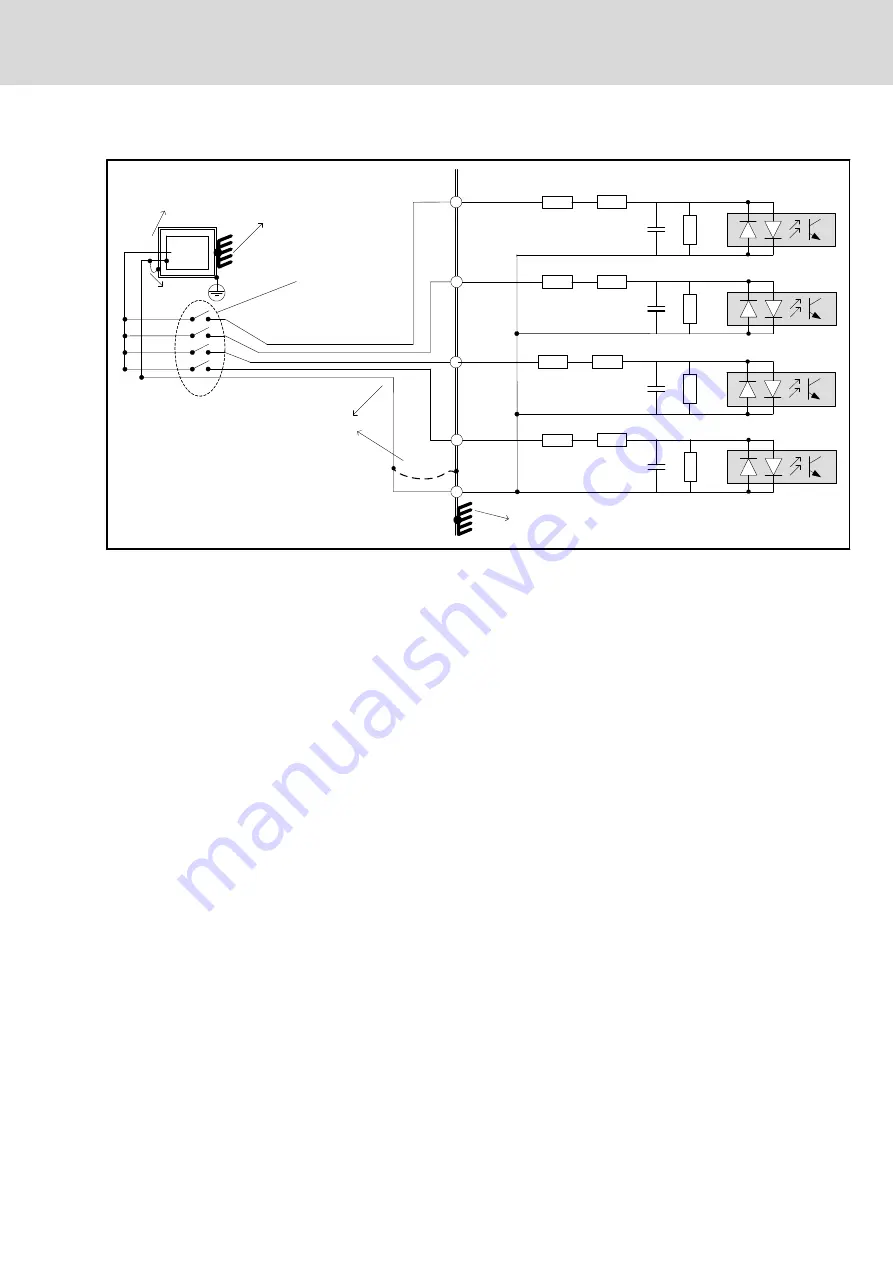
Fig. 8-8:
First group of digital inputs
The second group (DigIn4 ... DigIn7 with DigComm1) is schematically
identical to the first group.
Notes
1. Follow the following cabling instructions:
●
Shielded cable is recommended, but not mandatory.
If shielded cable is used, the shielding on the NYCe 4000 side of
the cable must be connected to Shield (house connector).
Connect the other side to a convenient metal part or leave it
unconnected.
●
The digital I/O may be associated with more than one power
supply, and/or the cable may contain more than one minus for
power supply. If this is the case and if the cable is unshielded,
connect at least one of the minus wires of each power supply to
Shield (house connector).
2. Connect the minus of the I/O power to the housing and/or safety earth (if
this is not already the case).
3. Connect the NYCe 4000, a power supply or other equipment on a metal
frame or mounting base and make sure there is a galvanic contact.
4. Each group of 4 inputs can be used either as high side switching (HSS),
or as low side switching (LSS).
NYCe 4000 Multi-axis motion control system Hardware Sys‐
tem Manual
69/233
NY4120 and NY4120/10: PWM Drive Module
R911337671_Edition 18 Bosch Rexroth AG







































































