




























18/96
SYDFED-2X, SYDFED-3X, SYHDFED-1X
| Product description
Bosch Rexroth AG, Edition 11.2021, RE 30017-B
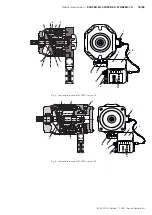
The proportional valve is controlled by digital electronics (
11
), which is integrated
in the valve. This closed-loop control electronics processes all of the control
signals required to operate the A10VSO respectively A4VSO variable displacement
pump under closed-loop pressure and flow control.
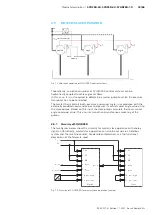
The control electronics receives its command values for pressure, swivel angle
and torque limit over the field bus systems (for the selection, see order option 13
in the type code) (
14
). Alternatively, the command values for pressure and swivel
angle can be provided via one analog input each. A pressure transducer can be
connected to the central plug (
12
). A
lternatively,
an HM20 pressure transducer can
be connected to port P of the pump or, if a SYDZ preload valve is used, installed in
port MP1 and connected to X2M1.
A position transducer with integrated electronics (
7
) fitted to the pump
establishes the actual swivel angle value. The acquired actual values are processed
in the amplifier and compared with the given command values. A minimum value
comparator ensures that automatically only the controller assigned to the desired
working point is active. Thereby, a system variable (pressure, swivel angle or
torque) is exactly corrected, the other two variables are below the specified
command values. The output signal of the minimum value comparator becomes
the command value for the valve control loop.
The actual value of the valve spool position is sensed using an inductive position
transducer (
6
). The output value of the valve position controller determines via the
amplifier output stage the current through the proportional solenoid
8
). As soon
as the working point is reached the control spool (
9
) of the proportional valve is
held in the centered position.
When the higher-level controllers demand an increase in the swivel angle (increase
in flow), the valve spool (
9
) must be moved away from the central position
(connection of the actuating piston (
4
) A → T) until the swivel angle has reached
the required value. The movement of the valve spool against the force of the spring
(
10
) is achieved by a corresponding increase in the electrical current through the
proportional solenoid (
8
).
A reduction of the swivel angle (reduction in flow) is achieved by connecting the
actuating piston (
4
) from P → A.
The actuating system of the pump can be supplied with pilot oil in three different
ways:
1. Internal, without pre-load valve (only possible for operating pressures >20 bar)
2. Internally, with pre-load valve (operating pressure 0…100 %)
3. External supply via a shuttle valve - automatic switching between internal/
external via a shuttle valve sandwich plate! (See chapter 5.3.6 “Internal/
external pilot oil“ on page 27).







































































