



















User’s Manual
BOSCH
- 69/77 -
Revision 1.6
TTCAN
11.11.02
manual_about.fm
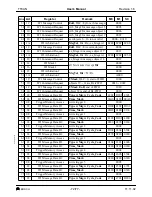
Figure 20: TTCAN Level 2 Drift Compensation
Figure 20 describes how in TTCAN Level 2 each time receiving node compensates the drift
between its own local clock and the Time Master’s clock by comparing the length of a Basic
Cycle in Local Time and in Global Time. If there is a difference between the two values and the
Disc_Bit in the Reference Message is not set, a new value for NumAct is calculated. If the
Synchronisation Deviation SD = |NumCfg-NumAct|
≤
SDL (Synchronisation Deviation Limit),
the new value for NumAct takes effect. Else the automatic drift compensation is suspended.
In TTCAN Level 2, QCS in the Clock Control register shows whether the automatic drift
compensation is active or suspended. In TTCAN Level 1, QCS is always ‘1’.
The current Time Master may synchronise its local clock speed and the Global Time phase to
an external clock source. Both actions require that EECS in the Operating Mode Register is
set.
The Stopwatch (see chapter 3.5.18 and chapter 5.5) may be used to measure the difference in
clock speed between the local clock and the external clock. The local clock speed is adjusted
by first writing the newly calculated NumCfg value (DenomCfg cannot be updated) into the
TUR Numerator Configuration register. The new value takes effect by writing ‘1’ to the ECS bit
of the Clock Control register.
The Global Time phase is adjusted by first writing the phase offset into the Global Time Preset
register. The new value takes effect by writing ‘1’ to the SGT bit of the Clock Control register.
The first Reference Message transmitted after the Global Time phase adjustment will contain
the Disc_Bit=‘1’.
QGTP in the Clock Control register shows whether the node’s Global Time is in phase with the
Time Master’s Global Time. QGTP is permanently ‘0’ in TTCAN Level 1 and when the
Synchronisation Deviation Limit is exceeded in TTCAN Level 2 (QCS=‘0’). It is temporarily ‘0’
while the Global Time is low-pass filtered to avoid an un-reasonableness in the value provided
to the application. There is no low-pass filtering when the last Reference Message’s contained
a Disc_Bit=‘1’ or when QCS=‘0’.
5.7 TTCAN Interrupt and Error Handling
The TTCAN module provides the same interrupts as the C_CAN module (see chapter 4.3.1)
as well as the additional TT Interrupt Vector.
Ref_Mark
previous
Ref_Mark
actual
Sync_Mark
Reference Message
Master_Ref_Mark
actual
Master_Ref_Mark
previous
÷
Start of
Basic Cycle
=
?
1
Time Unit Ratio
Calibration of







































































