














User’s Manual
BOSCH
- 75/77 -
Revision 1.6
TTCAN
11.11.02
manual_about.fm
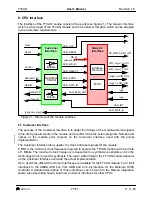
6. CPU Interface
The interface of the TTCAN module consist of two parts (see figure 21). The Generic Interface
which is a fixed part of the TTCAN module and the Customer Interface which can be adapted
to the customers requirements.
Figure 21: Structure of the module interface
6.1 Customer Interface
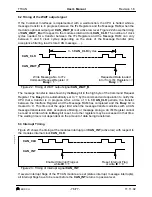
The purpose of the Customer Interface is to adapt the timings of the module-external signals
to the timing requirements of the module and to buffer / drive the external signals. Number and
names of the module ports depend on the Customer Interface used with the actual
implementation.
The Customer Interface also supplies the clock and reset signals for the module.
8 MHz is the minimum clock frequency required to operate the TTCAN module with a bit rate
of 1 MBit/s. The maximum clock frequency is dependent on synthesis constraints and on the
technology which is used for synthesis. The read / write timing of the TTCAN module depends
on the Customer Interface used with the actual implementation.
Up to now three different Customer Interfaces are available for the TTCAN module. Two 16-bit
interfaces to the AMBA APB bus from ARM and an 8-bit interface for the Motorola HC08
controller. A detailed description of these interfaces can be found in the Module Integration
Guide, also describing how to build new Customer Interfaces for other CPUs.
Customer
Generic
Clock
Reset
DataIN
Address(7:0)
CAN_WR_B
CAN_ADDR
CAN_DATA_IN
CAN_DATA_OUT
Interrupt
CAN_WAIT_B
CAN_RESET
RD_STATUS_REG_LOW
WR_<regx>_LOW
regx
WR_<regx>_HIGH
Interface
Interface
Address
Decode
MUX
<regx>_LOW_DIN
regy
<regx>_HIGH_DIN
CAN_SELECT
Buffers
Drivers
Control
Data Bus
Control
CAN_INT
DataOUT
CAN_CLK
DB_W
(generic parameter)
(optional output)
manual_cpu_ifc.fm







































































