





























Bot’n Roll ONE A User Assembling Manual
4.3.3. INTEGRATED CIRCUITS PLACEMENT
An integrated circuit is a miniaturized electronic circuit consistng
mainly of semiconductor devices such as transistors. The number of
transistors on integrated circuits can vary from a couple of
transistors to tens of millions of transistors.
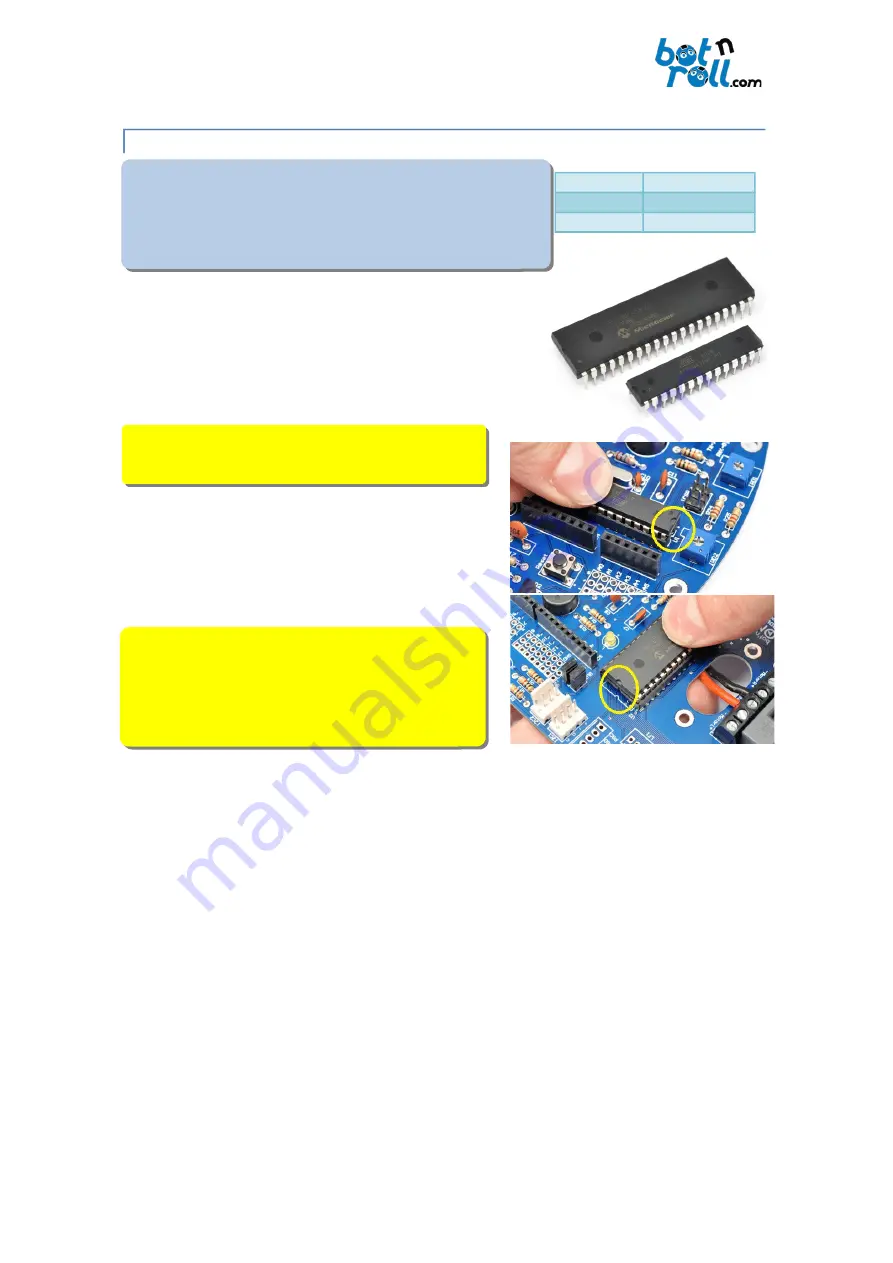
On the robot, two DIP format integrated circuits are
used:
PIC18F45K22
: 40 pins processing unit (PIC).
ATmega328
: 28 pins processing unit (Arduino).
NOTE:
Before insertng the integrated circuits ensure
that the Bot'n Roll ONE A is powered OFF.
It may be necessary to align the pins of integrated
circuits before insertng them on the sockets. Do this
carefully because the pins are fragile and can break if not
done properly or bended several tmes, becoming
irreparably damaged.
IMPORTANT NOTE
: The integrated circuits have a unique
insertng positon. In one of the edges, a cavity
corresponds to the printed mark on the PCB serigraphy.
Insert the ATmega328 on
U1
and the PIC18F45K22 on
U2
.
©Copyright 2018, SAR - Soluções de Automação e Robótca, Lda.
38
Fig. 56 Integrated circuits inserton
Descripton Component
U1
ATmega328
U2
PIC18F45K22
Summary of Contents for ONE A
Page 1: ......







































































