




























6 – 4
Repair manual
SWE100, 120, 120L, 120S, 140, 140L, 200D
© BT
Functions and parameters
Operating principle
T code
Valid from serial no.
Date
Order no.
841×842×843
6061850-
2012-08-30
258946-120
Event:
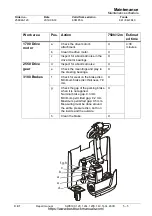
4. Driving in the fork direction
Preceding event(s)
Lower the tiller arm to the drive position.
Action(s)
Turn the speed control in the fork direction.
Influencing
elements
Speed control with Hall sensor [A5:S10-18].
Settings of operator parameters 4, 5 and 6 determine truck travel
performance.
Resulting
conditions
[T1:OUT.BRAKE RELEASE] goes {low}.
Brake coil [Q1] is activated, and the mechanical brake is released.
The pulsed current fed to the drive motor is proportional to speed control
actuation.
Event:
5. Driving in drive wheel direction
Preceding event(s)
Lower the tiller arm to the drive position.
Action(s)
Turn the speed control in the drive wheel direction.
Influencing
elements
Speed control with Hall-sensor [A5:S1-9].
Settings of operator parameters 4, 5 and 6 determine truck travel
performance.
Resulting
conditions
[T1:OUT. BRAKE RELEASE] goes {low}.
Brake coil [Q1] is activated, and the mechanical brake is released.
The pulsed current fed to the drive motor is proportional to speed control
actuation.
Event:
6. Neutral braking
Preceding
event(s)
Truck travels in fork or drive wheel direction.
Action(s)
Allow the speed control to return to the neutral position.
Influencing
elements
Setting of operator parameter 5.
Resulting
conditions
The drive motor [M1] works as a generator and via the transistor regulator
[T1] converts the truck's kinetic energy into electricity, thus reducing the
truck’s speed. The excess energy, in the form of electricity, is fed back to
the battery [G1] helping to recharge it. The mechanical brake [Q1] is
activated when the truck stops. [T1:OUT.BRAKE RELEASE] goes {high}.
https://www.besttruckmanuals.com/






















































