
























8625-2 Standard - 105
français
Comportement de la variable de réglage aux limites de stabilité
Les ouvrages traitant de la régulation présentent une série de règles de réglage,
permettant de définir les paramètres du régulateur par voie empirique. Afin d’éviter
des erreurs de réglage, il faut toujours tenir compte des conditions dans lesquelles
les différentes règles de réglage ont été établies. Outre les propriétés du circuit de
réglage et du régulateur proprement dit, le fait qu’il s’agisse de compenser la
variation de la grandeur perturbatrice ou de la grandeur de référence joue
également un rôle.
Règles de réglage selon Ziegler et Nichols (méthode par oscillation)
Avec cette méthode, la définition des paramètres du régulateur s’effectue sur la
base du comportement du circuit de réglage aux limites de stabilité. Les
paramètres du régulateur sont d’abord réglés de manière à placer le circuit réglé
en oscillation. A partir des caractéristiques critiques obtenues, on détermine le
réglage le plus favorable des paramètres du régulateur. La condition d’utilisation de
cette méthode est évidemment que la mise en oscillation du circuit de régulation
soit autorisée.
Marche à suivre:
•
Régler le régulateur en mode P (soit T
N
= 200 s), choisir ensuite une valeur
de K
P
aussi faible que possible.
•
Régler la valeur de consigne désirée.
•
Augmenter la valeur de K
P
jusqu’à ce que la variable de réglage produise
une oscillation permanente non amortie.
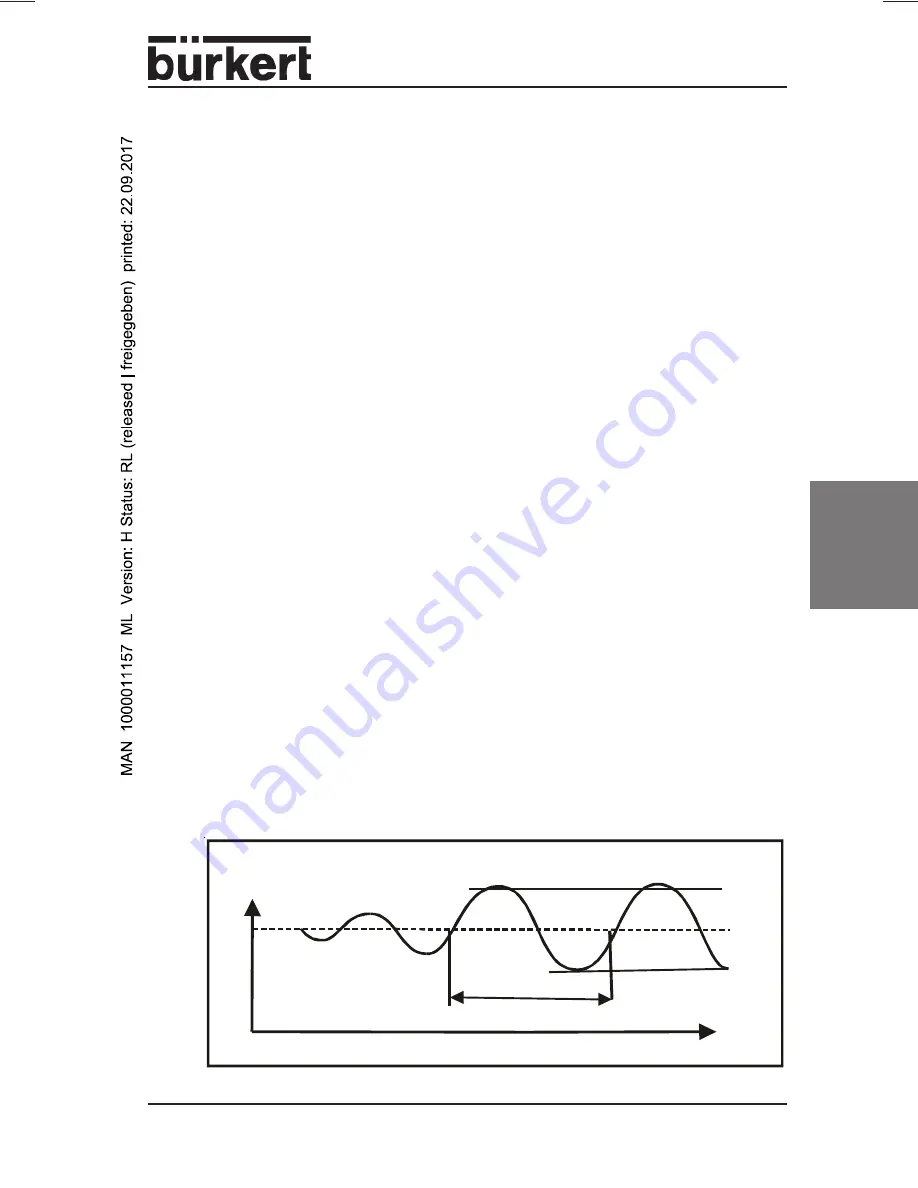
Le coefficient de proportionnalité (facteur d’amplification) réglé à la limite de stabilité
est désigné K
crit
. La période de l’oscillation en résultant est appelée T
crit
.
Règles de réglage d'un régulateur PI
Valeur réelle
X
t
Tcrit
Summary of Contents for 8625-2
Page 40: ...38 8625 2 Standard english ...
Page 78: ...76 8625 2 Standard deutsch ...
Page 117: ......
Page 118: ...www burkert com ...







































































