




























8625-2 Standard - 27
english
A PI controller has a proportional and an integral fraction (P and I fractions).
P fraction:
Function:
y = K
p
· x
d
K
p
is the proportionality index (amplification factor). It is the ratio of the controller
output range
∆
Y to the proportional range
∆
x
d
.
Characteristics:
A purely P controller works theoretically undamped, i.e. it is fast and hence
dynamically favourable. It has a residual control difference, i.e. it does not
completely eliminate the effects of disturbances and is thus relatively unfavourable
from a static viewpoint.
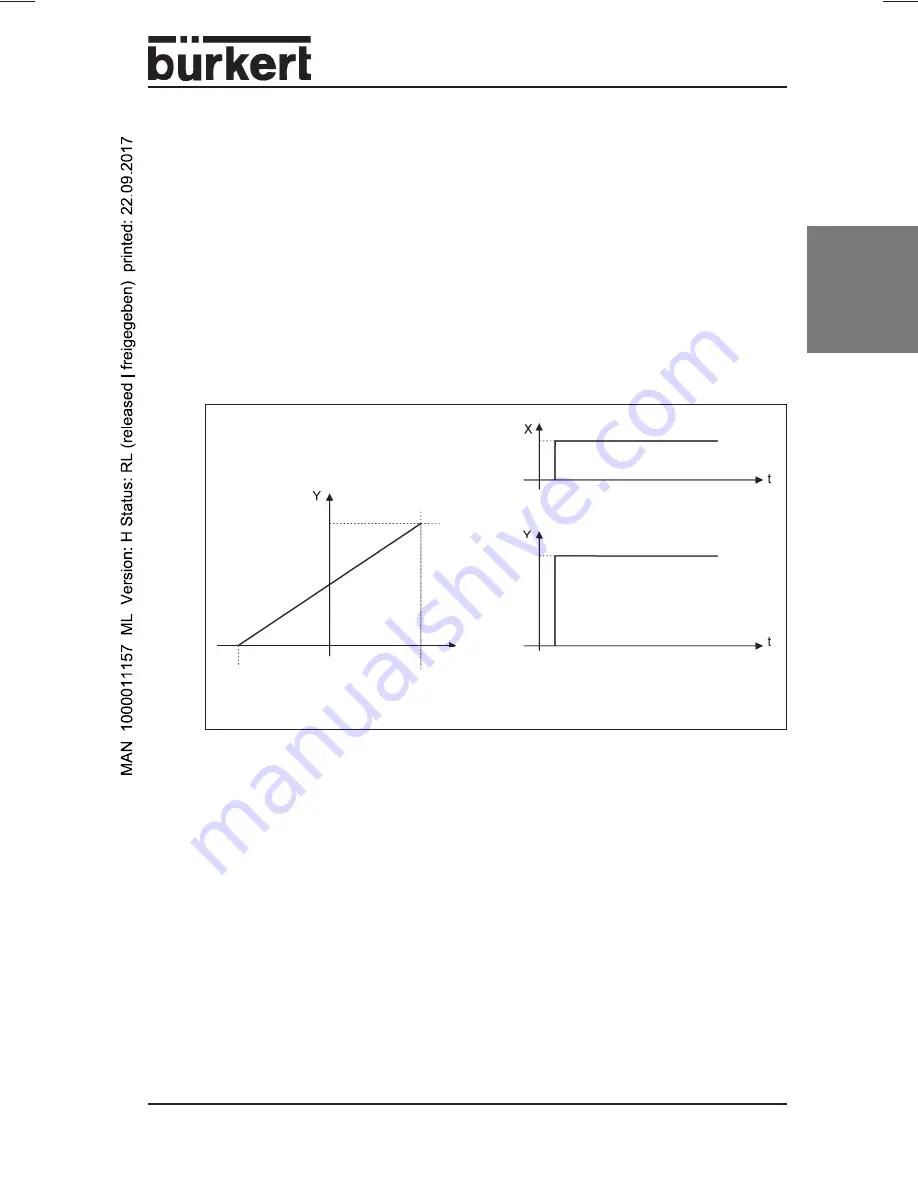
Characteristics of PI controllers
Characteristic and step response of the P fraction of a PI controller
Characteristic
Step response
y
max
y
min
y
0
x
d
x
d
k
p
*x
d
Proportional range
∆
x
d
Correcting range
∆
y
Summary of Contents for 8625-2
Page 40: ...38 8625 2 Standard english ...
Page 78: ...76 8625 2 Standard deutsch ...
Page 117: ......
Page 118: ...www burkert com ...







































































