








GI
8
3
0
High Precision FOG Integrated Navigation System
Protocol
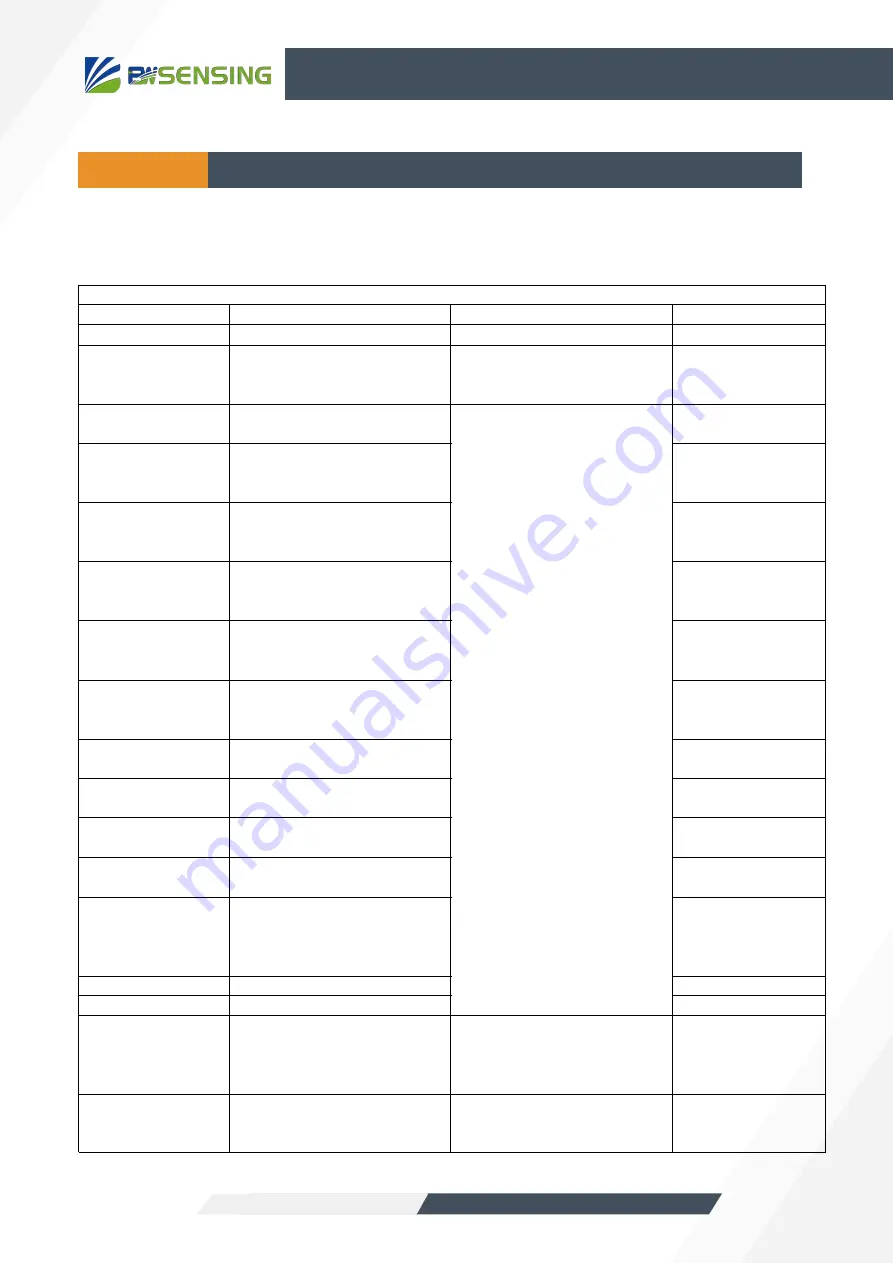
After the system is powered on, the normal operating time is 20Hz frequency, RS422 communication 115200bps,
n, 8, 1 broadcast broadcast navigation data, 48 bytes per frame data as shown in the following table:
Naviga on data
Byte number
Content
Data type
Byte count
1-2
Frameheader: 0X5A0X A5
Byte
2
3
Workingstatus:0- Monitoring
status,1-Sta calignment,2-INS
naviga on
Byte
1
4-5
Iner alpitchangle([-90,90]
degrees) in units of 0.01 degrees
Short int (low byte first,high byte
last)
2
6-7
Iner alguideroll angle
([-180,180]degrees), unit 0.01
degree
2
8-9
Iner alazimuth([-180,180]
degrees),northto eastis -, north
to west is +, unitis 0.01degrees
2
10-11
ner alX-axisangularvelocity
Wx(degree/s) in units of 0.01
deg/s
2
12-13
ner al Y-axis angular velocity
Wy(degree/s) in units of 0.01
deg/s
2
14-15
ner al Z-axis angular velocity
Wx(degree/s) in units of 0.01
deg/s
2
16-17
Iner al X-axis accelera on Ax(m/
s / s), unit0.01m / s/ s
2
18-19
Iner al Y-axisaccelera onAy (m /
s / s), unit 0.01m / s/ s
2
20-21
Iner al Z-axis accelera on Az (m /
s / s), unit0.01m / s/ s
2
22-23
Speed a er GPS satellite
posi oning, unit 0.1 m / sec
2
24-25
GPS trackangle([-180,180]
degrees), north to the east is -,
north to west is +, the unit is 0.1
degrees
2
26-27
GPS satellite number
2
28-29
GPS al tude, unit 0.1 m
2
30-33
La tude a er GPS satellite
posi oning, unit degree
Float(low byte first, high byte
a er), value range [-90,90]
degrees, the north la tude is +
and the south la tude is -.
4
34-37
Longitude a er GPS satellite
posi oning, unit degree
Float (low byte first, high byte
a er), value range[-180,180]
degrees, east longitude is +, west
4
BEWIS SENSING TECHNOLOGY LLC
www.bwsensing.com
Tel: +86 510 8573 7158







































































